Технология, организация и планирование портовых перегрузочных работ
![]()
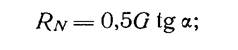
Где: RN—горизонтальная сила, передаваемая захватным органом на груз, определенная без учета трения в шарнирах, Н;
G—вес груза, Н;
n—коэффициент запаса,
ή—коэффициент полезного действия зажима;
μ.—коэффициент трения захватного органа по боковой поверхности груза.
При захвате груза, у которого бок
овые поверхности не вертикальные, выражение (27) имеет вид
|
Где: a — угол наклона боковой поверхности груза к вертикали;
r —угол трения захватного органа по грузу
Коэффициент μ принимают по справочным данным Для захватов, удерживающая сила которых определяется специфическими неисследованными особенностями захватного органа (внедрение клыков в груз, применение новых облицовочных материалов и т. д.), коэффициент r, определяют экспериментально.
Коэффициент полезного действия h при установке в шарнирах захвата подшипников качения принимают 1,0, в остальных случаях при приближенном расчете — 0,9. В уточненных расчетах h вычисляют по формулам, соответствующим кинематической схеме захвата.
Коэффициент запаса h=1,5 для исследованных захватных органов с коэффициентом μ, принятым по справочным данным. Для новых захватных органов п следует принимать не менее 1,9.
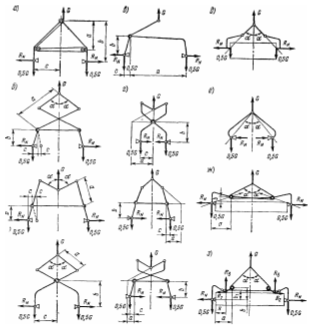
Рис 17. Схемы крановых зажимных грузозахватных приспособлений
У самозатягивающихся захватов, в которых сила обжатия пропорциональна весу поднимаемого груза, RN определяется конструкцией зажима.
Примечание: Коэффициенты μ,h,n принимают в соответствии с руководящим документом Р31.4001—75 «Устройства грузозахватные крановые. Типовые расчеты».
Для наиболее часто встречающихся в портах типов зажимов (рис. 17) выражения для определения RN следующие:
Ø для рычажно-полиспастного зажима (рис. 17, а)
![]()
Где: i—кратность горизонтального полиспаста
Ø для рычажных симметричных захватов (рис. 17, б),
![]()
Ø для рычажного несимметричного захвата (рис. 17, в)
![]()
Ø для рычажного захвата, сжимающего груз изнутри (рис. 17, г)
![]()
Ø для бесполиспастного захвата с гибким соединением рычагов (рис. 17. д.)
![]()
Ø для захвата с шарнирным соединением рычагов без стяжки (рис. 17, е)
для полиспастных захватов с гибким соединением рычагов (с горизонтальной стяжкой):

|

(рис. 17, з) условие надежного удержания груза

Где i — кратность полиспаста;
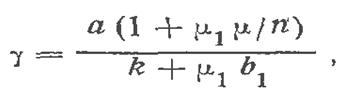
μ1 — коэффициент трения горизонтального плеча рычага по верхней поверхности груза.
Зажимы подбирают по назначению, грузоподъемности и размерным параметрам, при этом проверяют расчетным путем и экспериментально надежность удержания груза.
Подвески крановых грузозахватных приспособлений, выполняя задачу по соединению захватов с крюком крана, служат и другим целям: разносят стропы за габариты груза во избежание его повреждения; выравнивают нагрузку на захваты, стабилизируют и обжимают груз в «подъеме». Для этой цели используют, например, прижимную балку в подвеске с захватами для перегрузки листового металла (рис. 18).
17. СМЕННЫЕ КРАНОВЫЕ ГРУЗОЗДХВАТНЫЕ МЕХАНИЗМЫ
В портах наиболее распространенными грузозахватными механизмами являются грейферы, грузоподъемные электромагниты и спредеры. Для сменных ГЗМ требуется больше времени на подсоединение их к крану, чем для ГЗП, и во время эксплуатации их обычно закрепляют постоянно или временно за конкретной перегрузочной машиной.
Грейферы используют для перегрузки однородных грузов: навалочных, насыпных и круглого леса. Кроме того, грейферного типа захватами перегружают трубы и ряд других грузов. Грейферы представляют собой разновидность рычажных и рычажно-полиспастных грузозахватных механизмов управляемого действия с различным приводом рычажной системы. В зависимости от рода привода их разделяют на канатные и моторные (с автономным приводом). Последние применяют для перегрузки труднозачерпываемых грузов (камень, круглый лес и др.), для которых канатные грейферы недостаточно эффективны.
По количеству челюстей различают двух и многочелюстные грейферы. Последние могут иметь единый или независимый привод каждой челюсти. По назначению грейферы разделяют на нормальные, применяющиеся на перегрузке основной массы грузов, и специальные, использующиеся на выполнении определенных технологических операций (штивующие) или на перегрузке отдельных видов грузов (чугун, камень, металлолом, круглый лес и др.). Нормальные грейферы подразделяют по приспособленности для перегрузки грузов определенной насыпной массы и фракционного состава.
Технологическую характеристику грейферов, по которой их подбирают, составляют: назначение, тип подвески и род привода, вместимость (для навалочных и насыпных грузов) либо грузоподъемность (для генеральных и лесных грузов), собственная масса и габаритные размеры в раскрытом и закрытом состоянии. Вместимость грейфера определяют из условия использования наибольшей зачерпывающей способности, и она должна соответствовать грузоподъемности крана за вычетом собственной массы грейфера.
Грузоподъемные электромагниты (рис. 19) представляют собой грузозахватные устройства, основанные на использовании электромагнитных сил притяжения. Их применяют для перегрузки бестарных металлогрузов (чугун в чушках, металлолом, прокат черных металлов). Электромагниты могут иметь круглую либо прямоугольную форму. К технологической характеристике электромагнита как грузозахватного устройства относят форму, подъемную силу, собственную массу и размеры. Подъемная сила для различных грузов является величиной переменной и в характеристике магнитов ее обычно приводят отдельно для болванок, плит, листового металла, чугуна в чушках, стального скрапа и стальной стружки.
Другие рефераты на тему «Транспорт»:
Поиск рефератов
Последние рефераты раздела
- Проект пассажирского вагонного депо с разработкой контрольного пункта автосцепки
- Проектирование автомобильных дорог
- Проектирование автотранспортного предприятия МАЗ
- Производственно-техническая база предприятий автомобильного транспорта
- Расчет подъемного механизма самосвала
- Системы автоблокировки
- Совершенствование организации движения и снижение аварийности общественного транспорта в городе Витебск