Проектирование системы оптимального корректирующего устройства
Конечное значение переходной функции по выходу ДОС от величин параметров системы не зависит.
Начальное значение переходной функции по выходу УМ зависит от коэффициентов ![]() и
и ![]() , а также от всех постоянных времени системы.
, а также от всех постоянных времени системы.
2.1.2 Переходные функций
системы, прямые ПК
Построим переходную характеристику системы (рис. 2.1) по выходу ОУ (по выходу системы). Выражение для построения:
![]()
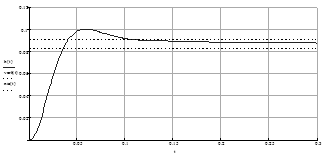
Рис. 2.1. Переходная характеристика системы по выходу системы
Определим прямые ПК по выходу системы (см. п.1.2.3).
Перерегулирование:
![]() ,
,
где hmax= 0,101;
hуст= 0,0873;
h(0) = 0.
![]() .
.
Границы интервала для установившегося значения [0,083;0,092].
Время регулирования: tр = 0,104 с.
Построим переходную характеристику системы (рис. 2.2) по выходу ДОС. Выражение для построения:
![]()
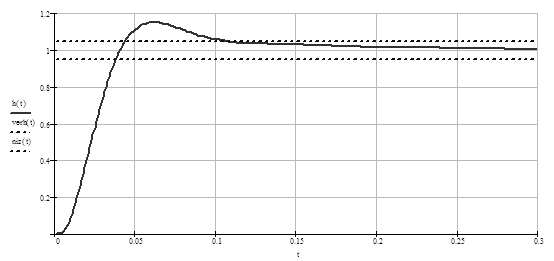
Рис. 2.2. Переходная характеристика системы по выходу ДОС
Определим прямые ПК (см. п.1.2.3).
Перерегулирование:
![]() ,
,
где hmax= 1,151;
hуст= 1;
h(0) = 0:
![]() .
.
Границы интервала для установившегося значения [0,95;1,05].
Время регулирования: tр = 0,106 с.
Полученные прямые ПК по выходу системы и по выходу ДОС, а также оценки ПК, найденные в пп.1.4.3 и 1.4.4 занесем в таблицу (табл. 2.2).
Таблица 2.2
|
По выходу системы |
По выходу ДОС |
Оценки прямых ПК | ||
|
Нижняя граница |
Верхняя граница | |||
|
|
15,4 |
15,14 |
6,65 |
35 |
|
tр, с |
0,104 |
0,106 |
0,053 |
0,292 |
ПК найденные по выходу системы и по выходу ДОС различаются незначительно. Это объясняется тем, что в обратной связи имеется малая постоянная времени, практически не влияющая на динамические свойства системы.
Из таблицы также видно, что полученные ПК находятся в пределах нижней и верхней границ, найденных в пп.1.4.3 и 1.4.4.
2.1.3 Сравнение начальных и установившихся значений переходных функций
Определим начальное и установившееся значение переходной функций по выходу УМ:
![]()
![]() ,
, ![]() .
.
Начальные и установившиеся значения переходных функций, рассчитанные в пп.2.1.1 и 2.1.2, совпадают. Эти значения приведены в табл. 2.3.
Таблица 2.3
|
|
|
|
|
|
| |
|
|
0 |
0 |
0 |
0 |
4415,98 |
4415,98 |
|
|
0,0873 |
0,0873 |
1 |
1 |
0 |
0 |
2.1.4 Определим величину Y0 ступенчатого сигнала, при котором система работает в зоне линейности УМ
Допустимая величина ступенчатого сигнала Y0, при котором система работает в зоне линейности УМ:
![]() ,
,
где ![]() B – максимальное выходное напряжение УМ;
B – максимальное выходное напряжение УМ;
![]() – максимальное значение выходного сигнала УМ на единичное ступенчатое воздействие.
– максимальное значение выходного сигнала УМ на единичное ступенчатое воздействие.
Тогда:
![]() B.
B.
2.2 Сигнал с постоянной скоростью
Воздействие в виде сигнала с постоянной скоростью имеет вид:
![]() .
.
Выражение для построения ошибки системы при обработке такого сигнала имеет вид:
![]() ,
,
где ![]() – ПФ ЗС (из п.1.4.4);
– ПФ ЗС (из п.1.4.4);
![]()
![]()
– изображение по Лапласу сигнала с постоянной скоростью.
Тогда:
![]() .
.
Значение установившейся составляющей ошибки было вычислено в п.1.4.5:
![]() В.
В.
График ошибки и ее установившейся составляющей изображен на рис. 2.3.
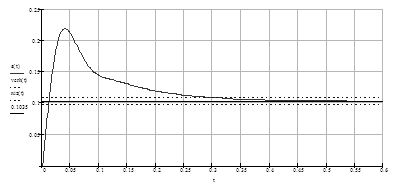
Рис. 2.3. График ошибки и ее установившейся составляющей при подаче сигнала с постоянной скоростью
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
- Мобильный офис с антенной решеткой стандарта GSM-900
- Разработка технологического процесса сборки и монтажа блока стробоскопа
- Субблок модуля управления МПС
- Генераторы, шифраторы, дешифраторы диспетчерской централизации
- Определение параметров полупроводниковых приборов по их статическим вольтамперным характеристикам
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем