Программное обеспечение системы принятия решений адаптивного робота
Другие важные аспекты состояния робота контролируются с помощью датчиков усилия и датчиков вращающего момента.Без этих датчиков нельзя обойтись, если роботы предназначены для работы с хрупкими объектами или объектами, точная форма и местонахождение которых неизвестны. Можно представить себе, что робототехнический манипулятор с максимальным усилием сжатия и одну тонну закручивает в патрон электр
ическую лампочку. При этом очень трудно предотвратить такую ситуацию, что робот приложит слишком большое усилие и раздавит лампочку. Но датчики усилия позволяют роботу ощутить, насколько крепко он держит лампочку, а датчики вращающего момента – определить, с каким усилием он ее поворачивает. Хорошие датчики позволяют измерять усилия втрех направлениях переноса и трех направлениях вращения.
Исполнительные механизмы являются теми средствами, с помощью которых роботы передвигаются и изменяют форму своего тела. Для того чтобы представить основные особенности конструкции исполнительных механизмов, необходимо вначале рассмотреть абстрактные понятия движения и формы, используя концепцию степени свободы.Как степень свободы мы будем рассматривать каждое независимое направление, в котором могут передвигаться либо робот, либо один из его исполнительных механизмов. Например, твердотельный свободно движущийся робот, такой как автономный подводный аппарат, имеет шесть степеней свободы; три из них, (х, у, z), определяют положение робота в пространстве, а три других – его угловую ориентацию по трем осям вращения, известную как качание (yaw), поворот (roll) и наклон (pitch). Эти шесть степеней свободы определяют кинематическое состояниеили позуробота. Динамическое состояниеробота включает по одному дополнительному измерению для скорости изменения каждого кинематического измерения.
![]() а) б)
а) б)
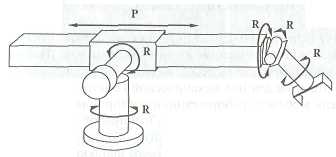
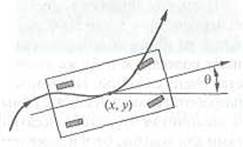
Рис. 2.2 – Особенности конструкции манипулятора робота: станфордский манипулятор (Stanford Manipulator) – один из первых манипуляторов робота, в котором используются пять поворотных шарниров (R) и одно призматическое сочленение (Р), что позволяет получить в целом шесть степеней свободы (а); траектория движения неголономного четырехколесного транспортного средства с рулевым управлением от передних колес (б).
Роботы, не являющиеся твердотельными, имеют дополнительные степени свободы внутри самих себя. Например, в руке человека локоть имеет одну степень свободы (может сгибаться в одном направлении), а кисть имеет три степени свободы (может двигаться вверх и вниз, из стороны в сторону, а также вращаться). Каждый из шарниров робота также имеет 1, 2 или 3 степени свободы. Для перемещения любого объекта, такого как рука, в конкретную точку с конкретной ориентацией необходимо иметь шесть степеней свободы. Рука, показанная на рис. 2.2, а, имеет точно шесть степеней свободы, создаваемых с помощью пяти поворотных шарниров, которые формируют вращательное движение, и одного призматического сочленения, который формирует скользящее движение. Чтобы убедиться в том, что рука человека в целом имеет больше шести степеней свободы, можно провести простой эксперимент: положите кисть на стол и убедитесь в том, что вы еще имеете возможность поворачивать руку в локте, не меняя положения кисти на столе. Манипуляторами, имеющими больше степеней свободы, чем требуется для перевода конечного исполнительного механизма в целевое положение, проще управлять по сравнению с роботами, имеющими лишь минимальное количество степеней свободы.
В мобильных роботах количество степеней свободы не обязательно совпадает с количеством приводимых в действие элементов. Рассмотрим, например, обычный автомобиль: он может передвигаться вперед или назад, а также поворачиваться, что соответствует двум степеням свободы. В отличие от этого кинематическая конфигурация автомобиля является трехмерной – на открытой плоской поверхности можно легко перевести автомобиль в любую точку (х, у), с любой ориентацией (см. рис. 2.2, б). Таким образом, автомобиль имеет три эффективные степени свободы,но две управляемые степени свободы.Робот называется неголономным,если он имеет больше эффективных степеней свободы, чем управляемых степеней свободы, и голономным,если эти два значения совпадают. Голономные роботы проще в управлении (было бы намного легче припарковать автомобиль, способный двигаться не только вперед и назад, но и в стороны), однако голономные роботы являются также механически более сложными. Большинство манипуляторов роботов являются голономными, а большинство мобильных роботов – неголономными.
В мобильных роботах применяется целый ряд механизмов для перемещения в пространстве, включая колеса, гусеницы и ноги. Роботы с дифференциальным приводомоборудованы расположенными с двух сторон независимо активизируемыми колесами (или гусеницами, как в армейском танке). Если колеса, находящиеся с обеих сторон, вращаются с одинаковой скоростью, то робот движется по прямой. Если же они вращаются в противоположных направлениях, то робот поворачивается на месте. Альтернативный вариант состоит в использовании синхронного привода,в котором каждое колесо может вращаться и поворачиваться вокруг вертикальной оси. Применение такой системы привода вполне могло бы привести к хаотическому перемещению, если бы не использовалось такое ограничение, что все пары колес поворачиваются в одном направлении и вращаются с одинаковой скоростью. И дифференциальный, и синхронный приводы являются неголономными. В некоторых более дорогостоящих роботах используются голономные приводы, которые обычно состоят из трех или большего количества колес, способных поворачиваться и вращаться независимо друг от друга.
Ноги, в отличие от колес, могут использоваться для передвижения не по плоской поверхности, а по местности, характеризующейся очень грубым рельефом. Тем не менее, на плоских поверхностях ноги как средства передвижения значительно уступают колесам, к тому же задача создания для них механической конструкции является очень сложной. Исследователи в области робототехники предприняли попытки разработать конструкции с самым разным количеством ног, начиная от одной ноги и заканчивая буквально десятками. Были разработаны роботы, оборудованные ногами для ходьбы, бега и даже прыжков (как показано на примере шагающего робота на рис. 2.3, а). Этот робот является динамически устойчивым;это означает, что он может оставаться в вертикальном положении, только непрерывно двигаясь. Робот, способный оставаться в вертикальном положении, не двигая ногами, называется статически устойчивым.Робот является статически устойчивым, если центр его тяжести находится над многоугольником, охваченным его ногами.
В мобильных роботах других типов для передвижения используются иные, чрезвычайно разнообразные механизмы. В летательных аппаратах обычно применяются пропеллеры или турбины. Роботизированные дирижабли держатся в воздухе за счет тепловых эффектов. В автономных подводных транспортных средствах часто используются подруливающие устройства, подобные тем, которые устанавливаются на подводных лодках.
Другие рефераты на тему «Программирование, компьютеры и кибернетика»:
- Анализ научной литературы по системам охлаждений персональных компьютеров
- Выполнение ввода и вывода информации с носителей. Работа с клавиатурой
- Имитационное моделирование станции технического обслуживания
- Принципы работы голографической памяти
- Классификация и характеристика видов, методов и средств защиты информации
Поиск рефератов
Последние рефераты раздела
- Основные этапы объектно-ориентированного проектирования
- Основные структуры языка Java
- Основные принципы разработки графического пользовательского интерфейса
- Основы дискретной математики
- Программное обеспечение системы принятия решений адаптивного робота
- Программное обеспечение
- Проблемы сохранности информации в процессе предпринимательской деятельности