Программное обеспечение системы принятия решений адаптивного робота
Введение
Роботы – это физические агенты, которые выполняют поставленные перед ними задачи, проводя манипуляции в физическом мире. Для этой цели роботов оснащают исполнительными механизмами, такими как ноги, колеса, шарниры и захваты. Исполнительные механизмы имеют единственное назначение – прилагать физические усилия к среде. Кроме того, роботов оснащают датчиками, к
оторые позволяют им воспринимать данные об окружающей их среде. В современных роботах применяются различные виды датчиков, включая те, что предназначены для измерения характеристик среды (например, видеокамеры и ультразвуковые дальномеры), и те, которые измеряют характеристики движения самого робота (например, гироскопы и акселерометры).
Большинство современных роботов можно отнести к одной из трех основных категорий. Роботы-манипуляторы, или роботы-руки, физически привязаны к своему рабочему месту, например на заводском сборочном конвейере или на борту Международной космической станции. В движении манипулятора обычно участвует вся цепочка управляемых шарниров, что позволяет таким роботам устанавливать свои исполнительные механизмы в любую позицию в пределах своего рабочего пространства. Манипуляторы относятся к типу наиболее распространенных промышленных роботов, поскольку во всем мире установлено свыше миллиона таких устройств. Некоторые мобильные манипуляторы используются в больницах в качестве ассистентов хирургов. Без робототехнических манипуляторов в наши дни не смогут продолжать свою производственную деятельность большинство автомобильных заводов, а некоторые манипуляторы использовались даже для создания оригинальных художественных произведений.
Ко второй категории относятся мобильные роботы.Роботы такого типа передвигаются в пределах своей среды с использованием колес, ног или аналогичных механизмов. Они нашли свое применение при доставке обедов в больницах, при перемещении контейнеров в грузовых доках, а также при выполнении аналогичных задач. Одним из примеров мобильного робота является автоматическое наземное транспортное средство (Unmanned Land Vehicle – ULV) NavLab, способное автономно передвигаться по автомагистралям в режиме самовождения. К другим типам мобильных роботов можно отнести автоматическое воздушное транспортное средство(Unmanned Air Vehicle – UAV), обычно используемое для воздушного наблюдения, химической обработки земельных участков и военных операций, автономное подводное транспортное средство(Autonomous Underwater Vehicle – AUV) для глубоководных морских исследованиях, ипланетоход, такой как робот Sojourner, приведенный на рис. 1.1, а.
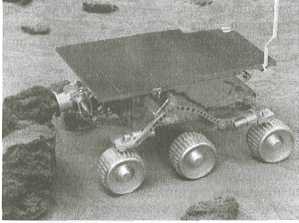
а) б)
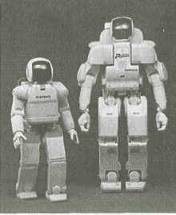
Рисунок. 1.1 – Фотографии широко известных роботов: движущийся робот Sojourner агентства NASA, который исследовал поверхность Марса в июле 1997 года (а); роботы-гуманоиды РЗ и Asimo компании Honda (б)
К третьему типу относятся гибридные устройства – мобильные роботы, оборудованные манипуляторами. В их число входят роботы-гуманоиды, которые по своей физической конструкции напоминают человеческое тело. Два таких робота-гуманоида показаны на рис. 1.1, б; оба они изготовлены в японской корпорации Honda. Гибридные роботы способны распространить действие своих исполнительных элементов на более обширную рабочую область по сравнению с прикрепленными к одному месту манипуляторами, но вынуждены выполнять стоящие перед ними задачи с большими усилиями, поскольку не имеют такой жесткой опоры, которую предоставляет узел крепления манипулятора.
Реальным роботам обычно приходится действовать в условиях среды, которая является частично наблюдаемой, стохастической, динамической и непрерывной. Некоторые варианты среды обитания роботов (но не все) являются также последовательными и мультиагентными. Частичная наблюдаемость и стохастичность обусловлены тем, что роботу приходится сталкиваться с большим, сложным миром. Робот не может заглянуть за каждый угол, а команды на выполнение движений осуществляются не с полной определенностью из-за проскальзывания приводных механизмов, трения и т.д. Кроме того, реальный мир упорно отказывается действовать быстрее, чем в реальном времени. В моделируемой среде предоставляется возможность использовать простые алгоритмы (такие как алгоритм Q-обучения), чтобы определить с помощью обучения необходимые параметры, осуществляя миллионы попыток в течение всего лишь нескольких часов процессорного времени, а в реальной среде для выполнения всех этих попыток могут потребоваться годы. Кроме того, реальные аварии, в отличие от моделируемых, действительно наносят ущерб. В применяемые на практике робототехнические системы необходимо вносить априорные знания о роботе, о его физической среде и задачах, которые он должен выполнять для того, чтобы быстро пройти обучение и действовать безопасно.
1. Анализ технического задания
1.1 Область применения и цель построения подсистемы
Разрабатываемая подсистема, называемая «Подсистемой планирования действий интеллектуального робота» предназначена для планирования целенаправленных действий интеллектуального мобильного робота в противодействующей, априорно неопределенной среде функционирования. Цель разработки – информационное моделирование функционирования интеллектуального робота на информационном уровне организации тактико-технического планирования информационно-двигательных действий (ИДД) мобильного робота. На этапе разработки подобная модель подсистемы отсутствовала и планирование не производилось, основываясь лишь на жестком алгоритме отработки заданной траектории перемещения исполнительных подсистем робота. Отсутствие обратной связи с выполняемыми операциями указывает на малую гибкость системы в целом, что значительно сокращает возможности применения ПР в реальных условиях автоматизированного производства. Непосредственная эксплуатация такой системы сталкивается со следующими проблемами:
- необходимость создания гибкой распределенной структуры гибких производственных модулей;
- решение задач временного согласования работы нескольких роботов при выполнении единой задачи;
- необходимость изменения управляющей программы при переходе в новые не структурированные производственные участки, где сказывается сложность ввода траектории отработки технологической операции роботом.
Основным недостатком является жёсткое требование к точности задания эталонной траектории, нарушение которой в процессе работы ведёт к нарушению исполнения всего ТП, при этом такую ситуацию сложно автоматически скорректировать, – необходимо интеллектуальное планирование действий.
1.2 Задачи, решаемые подсистемой
Задачи, решаемые подсистемой, заключаются в моделировании процесса синтеза информации о допустимых ИДД в зависимости от текущего состояния робота и конфигурации противодействующих объектов в среде функционирования, а также объектов, подлежащих обработке, – планирование выполняемых информационно-двигательных действий мобильного робота. Из всех задач, которые должны решаться подобной подсистемой следует выделить следующие:
Другие рефераты на тему «Программирование, компьютеры и кибернетика»:
- Браузеры - достоинства и недостатки
- Анализ прикладного программного обеспечения
- Модели жизненного цикла автоматизированных информационных систем
- Организация компьютерной сети в информационном пространстве высшего учебного заведения
- Геоинформационные технологии. Автоматизированные системы сбора и хранения и анализа информации. Основы автоматизированных систем проектно-изыскательских работ в природообустройстве
Поиск рефератов
Последние рефераты раздела
- Основные этапы объектно-ориентированного проектирования
- Основные структуры языка Java
- Основные принципы разработки графического пользовательского интерфейса
- Основы дискретной математики
- Программное обеспечение системы принятия решений адаптивного робота
- Программное обеспечение
- Проблемы сохранности информации в процессе предпринимательской деятельности