Программное обеспечение системы принятия решений адаптивного робота
Рассмотрим сначала метод планирования задания для централизованной системы. Суть подхода состоит в выполнении двухшаговой процедуры:
Шаг 1. На основе методов искусственного интеллекта найти последовательность подзаданий, выполняемых каждой из подсистем и сформированных в терминах входных алфавитов подсистем.
Шаг 2. Преобразовать эти последовательности в управляющую структу
ру, которая обеспечит координацию исполнения сформированного задания.
Обсудим более детально эту процедуру. В качестве метода решения задачи планирования будем использовать исчисление предикатов первого порядка. Входная информация, необходимая для решения задачи планирования, состоит из следующих компонент, содержащих описание:
К1 – возможностей каждой из подсистем,
К2 – начального состояния,
К3 – задания,
К4 – универсальных свойств.
Компонента К1 включает набор предложений (правил), отражающих возможности каждой подсистемы изменять состояние внешней среды (перемещение объектов, получение информации об объектах и т.д.). Отличительной особенностью этой компоненты является наличие сколемовской функции, относящейся к одной из подсистем. Множество К2 включает факты, описывающие начальное состояние системы. Компонента К3 представляет собой формулировку задания. Множество К4 описывает универсальные свойства, не зависящие от подсистем, входящих в состав МРС (это множество может быть пусто). Элементы всех множеств представляют собой правильно построенные формулы (ППФ) в исчислении предикатов 1‑го порядка.
Задача планирования состоит в получении последовательности операторов, обеспечивающих выполнение цели. При этом для обеспечения максимально возможного распараллеливания процесса исполнения представим множество К1 в виде:
![]() (4.6)
(4.6)
где N – множество подсистем.
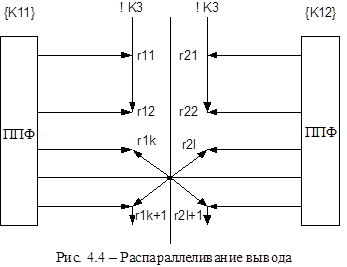
Таким образом, каждое подмножество К1i содержит только ППФ, отражающие возможности i‑ой подсистемы. После осуществления такого разбиения будем строить резолюции rij, и не-цели с элементами К1i настолько долго, насколько это возможно. Если этот процесс невозможно продолжить, оставаясь в К1i (это означает, что на этом этапе исполнения необходимо взаимодействие между подсистемами), строим резолюции с соседними подмножествами. Такой процесс обеспечит (в случае успеха) получение последовательности операторов, относящихся к каждой из подсистем, а также точек координации их взаимодействия. Далее полученные результаты используются для преобразования в управляющую структуру, обеспечивающую исполнение сформированного плана (рис. 4.4).
Другие рефераты на тему «Программирование, компьютеры и кибернетика»:
Поиск рефератов
Последние рефераты раздела
- Основные этапы объектно-ориентированного проектирования
- Основные структуры языка Java
- Основные принципы разработки графического пользовательского интерфейса
- Основы дискретной математики
- Программное обеспечение системы принятия решений адаптивного робота
- Программное обеспечение
- Проблемы сохранности информации в процессе предпринимательской деятельности