Программное обеспечение системы принятия решений адаптивного робота
Для того чтобы робот мог функционировать, ему недостаточно быть оборудованным только датчиками и исполнительными механизмами. Полноценный робот должен также иметь источник энергии для привода своих исполнительных механизмов. Для приведения в действие манипулятора и для передвижения чаще всего используются электродвигатели; определенную область применения имеют также пневматические приводы, в ко
торых используется сжатый газ, и гидравлические приводы, в которых используется жидкость под высоким давлением. Кроме того, в большинстве роботов имеются некоторые средства цифровой связи наподобие беспроводной сети. Наконец, робот должен иметь жесткий корпус, на который можно было бы навесить все эти устройства, а также, фигурально выражаясь, держать при себе паяльник, на тот случай, что его оборудование перестанет работать.

а) б)
Рис. 2.3 – Примеры роботов, передвигающихся с помощью ног: один из шагающих роботов Марка Рэйберта (Marc Raibert) в движении (а); роботы AIBO компании Sony, играющие в футбол (© от 2001 года, федерация RoboCup) (б)
Таким образом, существенной задачей в построении интеллектуальных робототехнических систем является информационное моделирование интеллектуального робота как некоторого активного агента среды. И, собственно, одной из задач проектирования рационального агента среды становится задача разработки модели планирования его информационно-двигательных действий.
2.2 Общий принцип построения модели
В соответствие традиционной модели организации моделирования, корда информационными потоками обмениваются исследователь-проектировщик и имитационная модель, обратная связь по результатам моделирования совершает внешняя по отношению к системе имитационного моделирования цепочка – человек с приобщением вспомогательных средств и методов программного обеспечения [11]. При этом исследователь-проектировщик выполняет функцию преобразования информации, которая состоит в интерпретации результатов и принятия решений относительно управления экспериментами и обобщением информации к базе знаний интеллектуального робота. Автоматизация управления экспериментами предполагает при этом создание замкнутого программно реализованного контура управления имитационной моделью 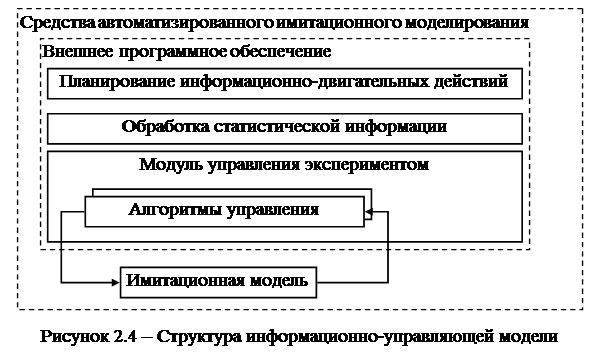 в рамках средств внешнего программного обеспечения (рис. 2.4).
в рамках средств внешнего программного обеспечения (рис. 2.4).
Целенаправленные серии экспериментов в соответствии с заданной целью функционирования робота и учетом ограничений конфигурационных параметров организуют модули, которые специально относят к составу внешнего программного обеспечения. В общем случае, эти модули должны задавать наборы начальных данных, инициировать прогоны модели в целом, обрабатывать результаты и принимать решения о дальнейшем развитии экспериментов соответствие реализуемому алгоритмом управления моделированием. Такой алгоритм, направляя эксперименты, в области допустимых значений параметров производит поиск такого их объединения, который бы обеспечивал оптимум заданного показателя качества, т.е. по существу решает задачу оптимизации:
![]() , (2.1)
, (2.1)
где f – целевая функция, представленная алгоритмически имитационная модель;
![]() – вектор параметров объекта моделирования;
– вектор параметров объекта моделирования;
X – множество допустимых значений входных параметров.
Таким образом, совокупность алгоритмических и программных средств, обеспечивающая процесс автоматизированного моделирования, образует систему автоматизации имитационного моделирования (САИМ) [36]. Поскольку пользователь при этом не вводит каждый набор начальных данных для очередного прогона имитационной модели и только указывает цель или критерий и область варьирования параметров, в то время как поиск допустимых решений задач моделирования выполняется при помощи САИМ автоматически, к последней можно применить определение интеллектуальной системы моделирования. Например, функции САИМ, в контуре управления гибкой производственной системы, в целом, заключаются в анализе альтернативных вариантов поведения роботов после принятия того или иного возможного решения относительно диспетчеризации и оперативного планирования информационно-двигательных действий и т.п.
Эффективность реализации этих функций обусловлена заменой жест кой логики управления интеллектуальным роботом, что предполагает использование в отдельных ситуациях заданных и фиксированных эвристик, гибким и динамическим механизмом, который обеспечивает принятие решений не только на основе подобного анализа текущего состояния робота, но и с учетом перспектив его развития. При этом объединяются высокая вероятность результатов и возможность автоматического принятия решений в режиме «жесткого» реального времени.
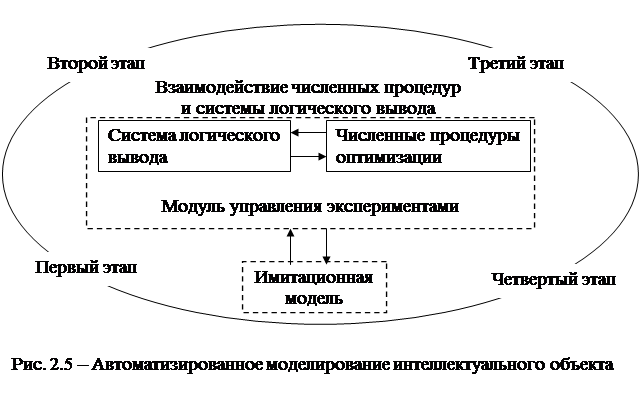 Проблема автоматизации управления экспериментами и синтеза знаний и построения базы знаний может быть представлена логической структурой поэтапного решения отдельных задач интеллектуального робота (рис. 2.5).
Проблема автоматизации управления экспериментами и синтеза знаний и построения базы знаний может быть представлена логической структурой поэтапного решения отдельных задач интеллектуального робота (рис. 2.5).
На первом этапе автоматизации управления экспериментами решаются две задачи: исполняется структурно-алгоритмическое построение собственно модуля управления; формируются содержательные основы и формальные требования к организации информационного обмена с имитационной моделью.
Задача структурно-алгоритмического построения модуля управления экспериментами и синтеза системы знаний решается в следующей последовательности: определяются состав и структура модуля (разрабатываются условия взаимодействия его компонент и положение в общей структуре САИМ).
При выполнении серии прогонов имитационной модели происходит целенаправленное варьирование значений параметров, которое может влиять на значения целевой функции не только посредством прямого влияния на показатели функционирования объекта моделирования, но и побочно посредством других сопряженных элементов объекта (робота). Как следствие, изменяются стоимостные и другие показатели. Наряду с тем, на значения некоторых параметров можно наложить ограничения, в частности часть их фиксировать, т.е. задать декларативно. Это может отображаться при формировании наборов начальных данных и инициализации начальных состояний процесса моделирования системы знаний.
Рассматривая имитационную модель как средство целенаправленного преобразования информации в соответствии с некоторой системой предписаний, имеет смысл говорить про алгоритм имитационного моделирования. Тогда формальную интерпретацию рассмотренных требований можно записать следующим образом:
![]() (2.2)
(2.2)
где S – входное слово алгоритма имитационного моделирования;
Q – множество допустимых наборов значений параметров робота;
С – область определения алгоритма имитационного моделирования.
Другие рефераты на тему «Программирование, компьютеры и кибернетика»:
Поиск рефератов
Последние рефераты раздела
- Основные этапы объектно-ориентированного проектирования
- Основные структуры языка Java
- Основные принципы разработки графического пользовательского интерфейса
- Основы дискретной математики
- Программное обеспечение системы принятия решений адаптивного робота
- Программное обеспечение
- Проблемы сохранности информации в процессе предпринимательской деятельности