Программное обеспечение системы принятия решений адаптивного робота
В работе [10] рассматривается архитектура систем навигации реального времени, используемых в том числе для обхода препятствий мобильными роботами (МР). Подробно рассмотрены следующие результаты:
– виды архитектуры и технологии соответствующих датчиков (сенсоров);
– представление различных моделей поведения с помощью сенсорно-управляемых алгоритмов;
– метод искусственного потенциальн
ого поля – алгоритм реального времени, разработанный специально для навигации МР во процессе движения.
В рассматриваемой системе данные инфракрасных датчиков создают образ среды в некоторой окрестности МР, в соответствии с которым затем строится траектория движения. Отсюда возникают строгие ограничения на скорость движения МР, связанные со скоростью получения и обработки данных, скоростью работы навигационного алгоритма и временем реакции управляющей системы МР на изменение обстановки.
В данной реализации метода потенциалов МР представляется как точка начала отсчета в полярных координатах, из которой вращающимся сенсором осуществляется непрерывное циклическое сканирование местности с сектором обзора 360°.
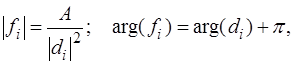
Пусть угол g – угловой шаг сканирования, di– результат i‑го (относительно текущего направления движения МР) замера дальности от МР до препятствия. В соответствие каждому diставится вектор силы fi, вычисляемый с помощью уравнений для искусственного потенциального поля:
 (2.3)
(2.3)
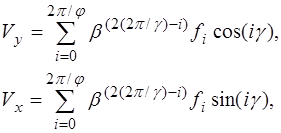
где A – фиксированная константа. После обзора всего сектора (360°) определяются новые компоненты вектора скорости Vx и Vy:
 (2.4)
(2.4)
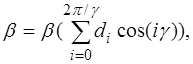
где b, с физической точки зрения, есть весовой множитель, используемый для того, чтобы на компоненты скорости большее влияние оказывали силы, действующие с фронта МР, нежели сзади. Утверждается, что в общем случае b есть функция g и di:
 (2.5)
(2.5)
при этом b пересчитывается каждый раз при нахождении нового вектора скорости.
Авторами статьи [11] предложен алгоритм планирования движения выпуклого многоугольного объекта в среде, содержащей многоугольные препятствия. Представлена эвристика, базирующаяся на рассмотрении моментов, что позволяет расширить алгоритм и ввести в рассмотрение дополнительную степень свободы мобильного робота (МР) – угол поворота. Также представлены результаты построения трассы для МР, движущегося по коридору.
В работе используется следующая терминология. Пусть рабочая область пространства W, в которой действует МР, является подмножеством Ân. Пусть O Ì W представляет собой множество препятствий в рабочей области, тогда свободным пространством в W будет являться множество F = W / O; задача построения пути МР в таком случае есть задача нахождения набора точек в F, определяющих траекторию движения МР из начальной точки в точку целевую.
Сначала рассматривается простой алгоритм, в котором многоугольный объект M, имеющий две степени свободы, перемещается в рабочем пространстве W, в котором присутствует конечное множество препятствий O. Текущее положение объекта M задается вектором x, начальное положение – вектором xs, а целевая точка – вектором xg. Тогда трасса строится по следующему алгоритму:
x ¬ xs
repeat
Dmin ¬ min (D(M, o)) "o Î O
Frepulse ¬ Dmin × 1 / |D|2
Fattract ¬ xg – x
Fres ¬ Fattract + a × Frepulse
x ¬ x + Fres
until (x = xg) or (|Fres| = 0)
Здесь D – вектор, доставляющий минимальное расстояние между M и препятствием o Î O. Константа a управляет влиянием препятствия на M в зависимости от расстояния. При использовании подобной потенциальной функции столкновений с препятствиями не происходит, однако, алгоритм может зацикливаться в случае достижения МР локального минимума в потенциальном поле. Для борьбы с этим явлением могут применяться различный методы, например, «барьер» из точек высокого потенциала вокруг точки локального минимума или метод Монте-Карло.
Далее для объекта M вводится дополнительная степень свободы – угол поворота q, начальная конфигурация объекта в данном случае – (xs, qs). Предполагается, что движется в коридоре минимального потенциала (КМП). Если он ориентирован так, что момент вращения МР в потенциальном поле минимален, то движение происходит таким образом, что главная ось направлена по касательной к КМП.
Пусть c – центр масс M, а P – множество векторов, описывающих положение некоторых контрольных точек, нормально распределенных по границе M относительно c. Предыдущий алгоритм модифицируется следующим образом:
x ¬ xs
q ¬ qs
repeat
Frepulse ¬ (0, 0)
moment ¬ 0
for each p Î P
Dmin ¬ min (D(c + p, o)) "o Î O
Frepulse ¬ Frepulse + Dmin × 1 / |D|2
moment ¬ moment + (p ´ Dmin) × k
endfor
Fattract ¬ xg – x
Fres ¬ Fattract + a × Frepulse
x ¬ x + Fres
q ¬ q + b ´ moment
until (x = xg) or (|Fres| = 0)
Константа b управляет величиной поворота и определяется эмпирически, поскольку математическое решение нетривиально и зависит от многих факторов. Кроме того, при практической реализации алгоритма, выбор c может быть неоднозначен. В рассматриваемых примерах для трехколесного МР в качестве c бралась середина оси между двумя задними колесами.
В работе [12] представлен метод обхода препятствий мобильным роботом (МР), получивший название метода «гистограмм векторных полей» (VHF‑метод). Он позволяет обнаруживать препятствия и обходить их во время движения. МР, управляемый данным алгоритмом, маневрирует быстро и без остановок даже среди большого количества неупорядоченных препятствий.
VHF‑метод для представления препятствий использует сетку на двумерной декартовой плоскости. Каждой ячейке сетки ставится в соответствие характерное значение, представляющее уровень «уверенности» алгоритма в присутствии препятствия в данной ячейке. Метод использует двухуровневую систему представления данных:
– на первом уровне – детальное описание среды, окружающей робота, с помощью декартовой сетки C;
– на втором уровне – полярная гистограмма H, которая строится по данным, содержащимся в C, вокруг центра масс МР как набор значений из C, соответствующий некоторым фиксированным секторам шириной a каждый. Каждому сектору k ставится в соответствие величина hk, называемая полярной плотностью препятствий в направлении k.
Выходными данными алгоритма являются сигналы управления МР.
Пусть C*, называемая активной областью, есть область сетки C размером ws´ws, построенная вокруг МР; ее элементами являются активные ячейки cij. Тогда C преобразуется в H следующим образом: строятся векторы препятствий, направление которых относительно точки текущего положения МР определяется как:
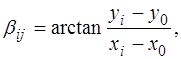 (2.6)
(2.6)
Другие рефераты на тему «Программирование, компьютеры и кибернетика»:
Поиск рефератов
Последние рефераты раздела
- Основные этапы объектно-ориентированного проектирования
- Основные структуры языка Java
- Основные принципы разработки графического пользовательского интерфейса
- Основы дискретной математики
- Программное обеспечение системы принятия решений адаптивного робота
- Программное обеспечение
- Проблемы сохранности информации в процессе предпринимательской деятельности