Программное обеспечение системы принятия решений адаптивного робота
- представление комплексной информации о рабочем пространстве робота, включая операции картографирования и нанесения условных планов передвижений робота;
- автоматическое согласование конфигурации робота и объектов среды;
- контроль плана действий в зависимости от динамических изменений в конфигурации объектов среды;
- процедурное построение условных информационно-двигательных траек
торий передвижения робота;
- обеспечение постоянной обратной связи плана действий с потоком сенсорных данных;
- синтез карты исследуемой среды.
1.3 Функциональные требования к подсистеме
Подсистема должна обеспечивать следующие функциональные возможности:
- планирование траекторий передвижения интеллектуального робота в априорно неопределенной динамической среде функционирования:
1) репрезентация противодействующих объектов среды и функционально-исполнительных узлов мобильного робота с использованием нечеткого конфигурационного пространства;
2) формирование траектории передвижения с фиксированным уровнем доверия;
3) обновление карты среды при исследовании новых участков среды функционирования.
- режим работы планировщика в реальном времени;
- модульность и наращиваемость подсистемы.
При наполнении базы знаний выбор общих характеристик (наименование, код, и т.п.) известных объектов возлагается на оператора. Параметры обхода объектов вводятся непосредственно из СУ ПР и записываются как дополнительные параметры объектов. Изменение траектории в базе знаний объектов производится только при помощи самой подсистемы, оператор не имеет возможности менять эти параметры вручную.
Подсистема обеспечивает обновление методов принятия решений за счёт объектно-ориентированной структуры информационно-моделирующего комплекса, т.е. перекомпоновки без изменения базовых связей между объектами моделирования.
2. Информационное моделирование функционирования интеллектуального робота
2.1 Обобщенная архитектура интеллектуального робота
С точки зрения построения обобщенной архитектуры интеллектуального робота, актуально воспользоваться понятием интеллектуального агента. В этом случае конструкция компонентов архитектуры агентов (датчиков, исполнительных механизмов и процессоров) уже определена и требуется лишь разрабатывать программы агента. Но успехи в создании реальных роботов не в меньшей степени зависят от того, насколько удачно будут спроектированы датчики и исполнительные механизмы, подходящие для выполнения поставленной задачи.
Датчики – это не что иное, как интерфейс между роботами и той средой, в которой они действуют, обеспечивающий передачу результатов восприятия. Пассивные датчики, такие как видеокамеры, в полном смысле этого слова выполняют функции наблюдателя за средой – они перехватывают сигналы, создаваемые другими источниками сигналов в среде. Активные датчики,такие как локаторы, посылают энергию в среду. Их действие основано на том, что часть излучаемой энергии отражается и снова поступает в датчик. Как правило, активные датчики позволяют получить больше информации, чем пассивные, но за счет увеличения потребления энергии от источника питания; еще одним их недостатком является то, что при одновременном использовании многочисленных активных датчиков может возникнуть интерференция. В целом датчики (активные и пассивные) можно разбить на три типа, в зависимости от того, регистрируют ли они расстояния до объектов, формируют изображения среды или контролируют характеристики самого робота.
В большинстве мобильных роботов используются дальномеры,которые представляют собой датчики, измеряющие расстояние до ближайших объектов. Одним из широко применяемых типов таких датчиков является звуковой локатор,известный также как ультразвуковой измерительный преобразователь. Звуковые локаторы излучают направленные звуковые волны, которые отражаются от объектов, и часть этого звука снова поступает в датчик. При этом время поступления и интенсивность такого возвратного сигнала несут информацию о расстоянии до ближайших объектов. Для автономных подводных аппаратов преимущественно используется технология подводных гидролокаторов, а на земле звуковые локаторы в основном используются для предотвращения столкновений лишь в ближайших окрестностях, поскольку эти датчики характеризуются ограниченным угловым разрешением. К числу других устройств, альтернативных по отношению к звуковым локаторам, относятся радары (в основном применяемые на воздушных судах) и лазеры. Лазерный дальномер показан на рис. 2.1.

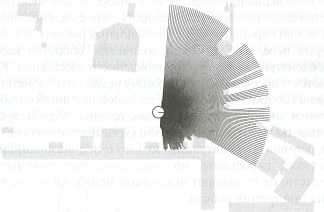
а) б)
Рис. 2.1 – Типичный пример датчика и его практического применения: лазерный дальномер (датчик расстояния) SICK LMS – широко применяемый датчик для мобильных роботов (а); результаты измерения расстояний, полученные с помощью горизонтально установленного датчика расстояния, спроектированные на двухмерную карту среды (б)
Некоторые датчики расстояния предназначены для измерения очень коротких или очень длинных расстояний. В число датчиков измерения коротких расстояний входят тактильные датчики,такие как контактные усики, контактные панели и сенсорные покрытия. На другом конце спектра находится глобальная система позиционирования(Global Positioning System – GPS), которая измеряет расстояние до спутников, излучающих импульсные сигналы. В настоящее время на орбите находятся свыше двух десятков спутников, каждый из которых передает сигналы на двух разных частотах. Приемники GPS определяют расстояние до этих спутников, анализируя значения фазовых сдвигов. Затем, выполняя триангуляцию сигналов от нескольких спутников, приемники GPS определяют свои абсолютные координаты на Земле с точностью до нескольких метров. В дифференциальных системах GPSприменяется второй наземный приемник с известными координатами, благодаря чему при идеальных условиях обеспечивается точность измерения координат до миллиметра. К сожалению, системы GPS не работают внутри помещения или под водой.
Вторым важным классом датчиков являются датчики изображения – видеокамеры, позволяющие получать изображения окружающей среды, а также моделировать и определять характеристики среды с использованием методов машинного зрения. В робототехнике особо важное значение имеет стереоскопическое зрение, поскольку оно позволяет получать информацию о глубине; тем не менее, будущее этого направления находится под угрозой, поскольку успешно осуществляется разработка новых активных технологий получения пространственных изображений.
К третьему важному классу относятся проприоцептивные датчики,которые информируют робота о его собственном состоянии. Для измерения точной конфигурации робототехнического шарнира, приводящие его в действие электродвигатели часто оснащаются дешифраторами угла поворота вала,которые позволяют определять даже небольшие приращения угла поворота вала электродвигателя. В манипуляторах роботов дешифраторы угла поворота вала способны предоставить точную информацию за любой период времени. В мобильных роботах дешифраторы угла поворота вала, которые передают данные о количестве оборотов колеса, могут использоваться для одометрии – измерения пройденного расстояния. К сожалению, колеса часто сдвигаются и проскальзывают, поэтому результаты одометрии являются точными только для очень коротких расстояний. Еще одной причиной ошибок при определении позиции являются внешние силы, такие как течения, воздействующие на автономные подводные аппараты, и ветры, сбивающие с курса автоматические воздушные транспортные средства. Улучшить эту ситуацию можно с использованием инерционных датчиков,таких как гироскопы, но даже они, применяемые без других дополнительных средств, не позволяют исключить неизбежное накопление погрешности определения положения робота.
Другие рефераты на тему «Программирование, компьютеры и кибернетика»:
Поиск рефератов
Последние рефераты раздела
- Основные этапы объектно-ориентированного проектирования
- Основные структуры языка Java
- Основные принципы разработки графического пользовательского интерфейса
- Основы дискретной математики
- Программное обеспечение системы принятия решений адаптивного робота
- Программное обеспечение
- Проблемы сохранности информации в процессе предпринимательской деятельности