Применение магнетронных генераторов большей мощности в радиолокационных системах
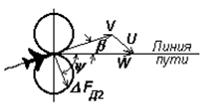
Рисунок 2.8 – Полярная диаграмма ширины спектра вторичных доплеровских частот в горизонтальной плоскости
Значение ширины спектра DFД2 достигает минимума при установке антенны в положение, при котором проекция направления максимума диаграммы направленности на земную поверхность совпадает с направлением линии пути самолёт
а.
При этом частоты колебаний, отражённых от точек А и В, равны между собой и наибольшая частота биений образуется при отражении от точек С и В (или А) (рис. 2.5).
![]() . (2.7)
. (2.7)
Эта величина достаточно мала (например, при W = 720 км/ч, g = 78°, l = 5 см, ![]() =5° получим FД2О » 4 Гц, т.е. практически нулевые биения.
=5° получим FД2О » 4 Гц, т.е. практически нулевые биения.
Для зондирующего сигнала в виде некогерентных импульсов следует иметь в виду, что отражённые импульсы от равноудалённых целей имеют одинаковую (хотя и случайную) начальную фазу. Поэтому; при достаточно высокой частоте повторения изменение амплитуды импульсов на входе приёмника за счёт биений будет происходить также, как для амплитуды непрерывных колебаний.
Для выделения вторичных доплеровских биений в некогерентных РЛС достаточно воспользоваться обычным амплитудным детектором, в то время как в когерентных РЛС для определения требуется специальное опорное (когерентное) напряжение и фазовый детектор. За счёт вторичного эффекта Доплера амплитуда результирующего сигнала от площадки Si изменяется от одного периода повторения импульсов к другому с частотой FД2.
На рис. 2.8 показаны изменения амплитуды некогерентных импульсов на входе приёмника (а) и на выходе амплитудного детектора (б) за счёт вторичных доплеровских биений, принимаемых только от участка Si. При развороте антенны на угол относительно линии пути частота биений будет достаточно высока, что приводит к быстрому "мерцанию" яркости (амплитуды) отметки цели (рис. 2.8,а). При y = 0 частота биений минимальна (рис.2.7). Минимальную частоту биений можно зафиксировать на индикаторе кругового обзора, если выключена азимутальная развёртка, а угловое положение линии развёртки дальности с яркостной модуляцией отметок целей медленно изменяется лётчиком за счёт ручной регулировки азимутального положения антенны. При совпадении проекции оси косекансной диаграммы направленности с линией пути самолёта частота "мерцания" яркостных отметок всех целей на развёртке дальности будет минимальной и близкой к нулю. Угол смещения развёртки дальности относительно нуля азимутальной шкалы индикатора будет соответствовать углу сноса b самолёта (рис.2.7). При измерении угла сноса самолёта управление движением антенны по азимуту производится вручную путём периодического подключения обмотки управления азимутального электродвигателя к пониженному переменному напряжению той или иной фазы, определяющей направление движения. Это выполняется с помощью клавиш, размещённых на лицевой панели основного индикатора слева от экрана. Так как питание двигателя осуществляется при этом пониженным напряжением, то скорость азимутального движения рефлектора при измерении угла сноса меньше, чем при других режимах. Для удобства управления антенной и получения требуемой точности её установки в РЛС предусмотрена возможность плавного изменения скорости с помощью специального регулятора, совмещённого с регулятором "Контраст".
Момент совпадения оси диаграммы с линией пути определяется по уменьшению до минимума частоты "мерцания" яркостной модуляции линии развёртки, а отсчёт угла сноса производится по азимутальной шкале индикатора, имеющей градуировку через два градуса (см. рис.2.9).
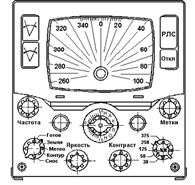
Рисунок 2.9 – Передняя панель индикаторного блока
Управление РЛС в режиме "Снос" осуществляется органами управления, расположенными на основном индикаторе. К ним относятся: переключатель длительностей развёртки; регулятор наклона антенны "Наклон"; регулятор "Контраст"; клавиши " ![]() " , расположенные слева от экрана индикатора.
" , расположенные слева от экрана индикатора.
Режим работы "Коррекция"
На ряде самолётов гражданской авиации, на которых установлены бортовые навигационные вычислители, с помощью РЛС "Гроза" может быть произведена коррекция счисленных вычислителями текущих координат места самолёта. Для этого используется какой-либо чётко наблюдаемый и легко опознаваемый объект с известными координатами и, по возможности, наименьших размеров. Его координаты вводятся в навигационный вычислитель, который при работе в специальном режиме определяет ожидаемые наклонную дальность и курсовой угол этого объекта в данный момент времени. Полученная информация передаётся вычислителем в РЛС, где она наносится на экран индикатора в виде светящегося кольца ожидаемой дальности и радиальной линии ожидаемого курсового угла (электронное перекрестие). На пересечении этих линий и должно по расчетам вычислителя находиться радиолокационное изображение наземного объекта. Так как текущие координаты места самолёта определяются вычислителем с ошибкой, точного совпадения практически не происходит и, чтобы его осуществить, необходимо изменить (увеличить или уменьшить) определённые вычислителем значения координат. Значения текущих координат места самолёта, при установке которых достигнуто совпадение, можно считать истинными и использовать в вычислителе, взамен ранее счисленных, для всех последующих расчётов до следующей очередной коррекции. Таков принцип выполнения радиолокационной коррекции. Радиолокатор при коррекции навигационного вычислителя является только индикатором совмещения, служащим для определения момента наложения перекрестия на изображение объекта. Все управление перекрестием и установка необходимых режимов работы различной аппаратуры борта осуществляется при этом с пульта вычислителя, а каких либо операций с помощью имеющихся в РЛС "Гроза" органов управления не производится. Формирование электронного перекрестия осуществляется в радиолокаторах "Гроза" в специальном блоке коррекции.
Режим работы "Готов"
Когда переключатель режимов работы установлен в положение "Готов", излучения радиоволн не происходит, но радиолокатор находится в состоянии готовности к немедленной работе, если перед этим не менее чем 5 мин он был подключен к самолетной сети с помощью клавиши "РЛС"
3. ФУНКЦИОНАЛЬНЫЕ СХЕМЫ БЛОКОВ РЛС "ГРОЗА"
3.1 Антенный блок
Антенный блок РЛС "Гроза" предназначен для выполнения следующих функций:
излучения в пространство высокочастотных импульсов, генерируемых передающим устройством станции в пределах узкого и веерного луча в зависимости от режима работы РЛС;
приёма сигналов, отражённых от наземных и воздушных отражающих объектов;
изменения направления излучения и приёма сигналов в азимутальной плоскости;
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
- Биполярные транзисторы
- Параметрические феррорезонансные стабилизаторы переменного напряжения. Компенсационные стабилизаторы напряжения и тока
- Метод статистической и гармонической линеаризации. Расчет автоколебаний по критерию Найквиста
- Анализ избирательных цепей в частотной и временной областях
- Система автосопровождения источника сигнала по направлению
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем