Проектирование и расчёт микронного многооборотного микроиндикатора
Теоретическая часть
Описание задания
Техническое задание. Спроектировать по предложенной схеме микронный многооборотный микроиндикатор
Таблица исходных данных
| Исходные данные |
Обозначение |
Единица изме рения |
Вариант № 5.2. | |
|
Пределы измерения |
l |
мм |
0 .1 | |
|
Цена деления шкалы |
С |
мкм |
1 | |
|
Диаметр шкалы |
D |
мм |
40 | |
|
Расстояние между соседними штрихами |
Х |
мм |
1,1 | |
|
Допускаемая погрешность измерения |
d |
мкм |
1 | |
|
Максимальное измерительное усилие |
Р |
Н |
1,5 | |
|
Максимальный перепад усилий |
dР |
Н |
0,6 | |
|
Интервал рабочих |
Т |
°С |
20 ± 5 | |
|
Габариты прибора |
L * B * H |
мм |
100 * 65 * 30 | |
Схема микронного многооборотного микроиндикатора
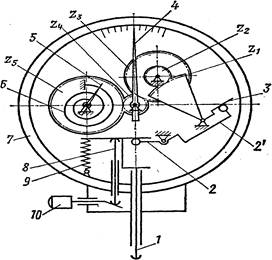
Краткое описание устройства
Микронный многооборотный индикатор состоит из:
1. Стержень (шпиндель);
1-2. Синусный механизм;
2’-3. Кулисный механизм (с ведущим кривошипом);
4. Стрелка точного отсчёта;
5. Стрелка грубого отсчёта;
6. Натяжной волосок;
7. Корпус;
8. Толкатель;
9. Силовая пружина;
10. Арретир;
а также зубчатых колёс Z1 Z2 Z3 Z4 Z5
Описание работы устройства
Многооборотный индикатор служит для измерения с высокой точностью перемещения стержня (шпинделя) 1 ( см. схема стр.4). Передача движения от измерительного стержня 1 к стрелке 4 осуществляется посредством последовательного соединения синусного механизма 1—2, кулисного механизма (с ведущим кривошипом) 2'—3 и зубчатых передач Z1Z2 и Z3Z4. Отсчёт числа полных оборотов стрелки 4 производится с помощью вспомогательной шкалы, стрелка 5 которой насажана на ось зубчатого колеса Z5, находящегося в зацеплении с трибом Z4. Силовое замыкание кинематической цепи осуществляется натяжным волоском 6. Измерительное усилие создаёт силовая пружина 9. Механизм смонтирован на плате в корпусе 7. Юстировка механизма производится при помощи эксцентриковой пятки, изменяющей длину рычага 2 синусного механизма, и накладки, изменяющей угловое положение рычага 3 кулисного механизма (на схеме не показаны). Отвод шпинделя 1 вверх осуществляется арретиром 10 через толкатель 8.
Расчёт микронного микроиндикатора
1. Синусный механизм
Синусный механизм с низшими парами (рис.1, а ) — разновидность четырёхзвенного кулисного механизма. В приборных устройствах обычно кулисный камень 2, входящий в две низшие пары, отсутствует, а его заменяет высшая пара (рис.1, б). Это повышает точность механизма и уменьшает трение. Наиболее рационально применение высшей пары с точечным контактом (сфера — плоскость), в этом случае число избыточных связей q = 0 — механизм статически определимый.
Функция положения механизма, изображённого на рис. 1(б) при ведущем рычаге 2 (зависимость линейного перемещения l ведомого звена 1 от угла поворота j ведущего) выражается формулой :
l = r * sin j (1)
Передаточная функция механизма в виде отношения линейной скорости кулисы и угловой скорости рычага
 (2)
(2)
При малых значениях угла j, ![]() , следовательно, в этом случае механизм приближённо даёт линейную зависимость между l и j
, следовательно, в этом случае механизм приближённо даёт линейную зависимость между l и j
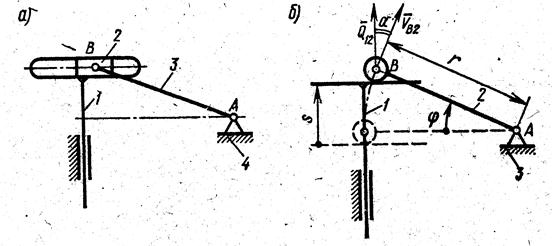
Рис.1(а, б).
Погрешность схемы (теоретическая ошибка) при осуществлении заданной линейной зависимости между входным и выходным перемещениями найдётся из выражения :
 (3)
(3)
Заменив  (4)
(4)
получим:  (5)
(5)
Для определения искомой длины r рычага (при заданном максимальном перемещении lmax и коэффициенте пропорциональности к) применим полином Чебышева Р3 (х), наименее уклоняющийся от нуля в промежутке [ 0 £ x £ 1 ]; узлы интерполяции соответствуют значениям корней полинома х=0; х=0,4641, х=0,9282. Задача сводится к решению относительно r уравнения ![]() , или в развернутом виде :
, или в развернутом виде :
 (6)
(6)
Решая это уравнение, получаем r = 5(мм); при ![]() .
.
 отсюда
отсюда ![]()
Передаточная функция механизма в виде отношения линейной скорости кулисы и угловой скорости рычага:
Для синусного механизма
1. Погрешность в длине рычага dr .
Коэффициент влияния этой ошибки:
2. Перекос плоскости кулисы (измерительного стержня) на угол db1
Коэффициент влияния этой ошибки

3. Погрешность начального положения рычага dy.
Коэффициент влияния определяется по формуле :
2. Кулисный механизм
Эти механизмы могут быть четырёхзвенными с низшими парами (рис.2а) или трехзвенными с высшими кинематическими парами (рис.2б); последний вариант механизма для приборов предпочтительнее — он проще, точнее, обладает меньшим трением. Наиболее рационально применение высшей пары с точечным контактом (сфере — плоскость), в этом случае число избыточных связей q = 0 — механизм статически определимый.
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем