Система автоматического регулирования фокусировки пятна
Wп = k/P(T1P +1);
Подставим значения:
Wп = 33/P(0.33P + 1).
2. Структурная схема САР
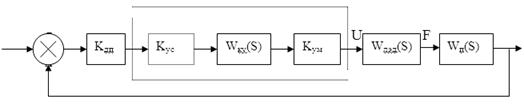
В силу малого значения Tф передаточная функция датчика положения принимает вид:
W1(P) = kдп
Определим передаточную функцию разомкнутой системы:
W(P) = Wдп (P) * WЛЭД(P) * Wп(P)
W(P) = 1784
,3 /(S(5*10-4P+1)(0.33P+1))
K1 = 1784,3; 20LogK1=65 дб
T1 = 0.33
T2 = 5*10-4
3. Синтез САР
При синтезе надо исходить из того, что объект регулирования – неизменная часть, а синтезу подлежат корректирующее устройство и регулятор – изменяемая часть системы.
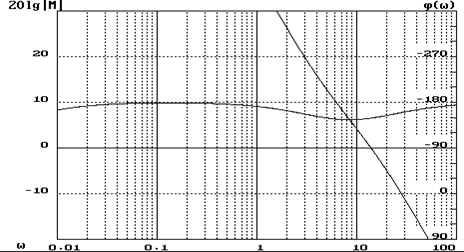
Полученная выше система является неустойчивой. Поэтому необходимо произвести расчет корректирующего устройства, используя частотный метод синтеза, основанный на построении желаемой ЛАХ – Lж(S).
При формировании желаемой ЛАХ следует учитывать следующие рекомендации:
1) Вид низкочастотной области ЛАХ определяет главным образом точность работы САР. Среднечастотная область, прилегающего к частоте среза wср, определяет в основном запас устойчивости, т.е. качество переходных процессов. Высокочастотная область лишь незначительно влияет на качество процессов управления.
2) Желаемая ЛАХ в возможно большем интервале частот должна совпадать с ЛАХ исходной нескорректированной системы L. В противном случае реализация КУ может существенно усложниться.
3) В низкочастотной области наклон желаемой ЛАХ должен составлять -20×n дБ/дек, где n - порядок астатизма. Желаемая ЛАХ на частоте w =1 с-1 должна иметь ординату 20lgk, где K – общий коэффициент усиления разомкнутой системы (если n =0, то на частоте w=0).
4) Если задана допустимая ошибка emax при гармоническом входном воздействии
g(t) =g max sin wgt,
то желаемая ЛАХ должна располагаться выше контрольной точки Ak, имеющей на частоте wg ординату
![]()
В районе частоты среза cр наклон желаемой ЛАХ выбирается равным -20дб/дек, что позволяет обеспечить запас устойчивости. Чем больше протяженность участка с наклоном - 20 дб/дек, тем больше запас устойчивости, т.е. выше качество переходного процесса.
Фазовая характеристика в этой области частот имеет вид
![]() .
.
Для того, чтобы обеспечить заданное качество запас устойчивости по фазе на частоте среза c ![]() должен составлять 30¸60°, а запас устойчивости по амплитуде, определяемый на частоте где j(w)=-180°, должен составлять 6¸10 дб. Это достигается, если постоянные времени удовлетворяют условиям
должен составлять 30¸60°, а запас устойчивости по амплитуде, определяемый на частоте где j(w)=-180°, должен составлять 6¸10 дб. Это достигается, если постоянные времени удовлетворяют условиям
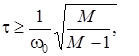
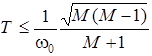 .
.
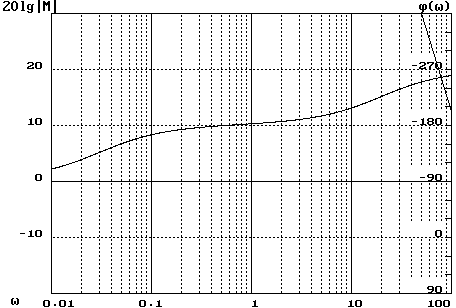
Исходя из рисунка:
wо = 8000 с-1;
По формулам выше:
t = 0.23*10-3 с;
T = 0.04*10-3 с;
После построения желаемой ЛАХ определяется ЛАХ корректирующего устройства по формуле
![]()
По виду этой кривой можно определить передаточную функцию КУ. Для этого следует построить симптотической ЛАХ КУ, а затем определить ее наклон на частотах w®0, и точки перегиба. Наклон характеристики на частотах w®0 в –20×n с/дек определяет сомножитель 1/sn в Wку(s). Перегиб ЛАХ на частоте w=1/T на –20×n с/дек приводит к появлению членов 1/(Ts+1)n в передаточной функции КУ, а перегиб ЛАХ на частоте w=1/t на –20×n с/дек к появлению членов (Ts+1)n. Коэффициент передачи КУ определяется по значению ординаты симптотической ЛАХ КУ на частоте w=1 с-1 (если n =0, то на частоте w=0).
Процесс построения желаемой ЛАХ и корректирующего устройства в первом приближении имеет вид (вложенная в пояснительную записку логарифмическая бумага (формат А3)):
4. Моделирование САР
Моделирование САР будем производить с помощью пакета ТАУ.
1. Моделирование нескорректированной (желаемой) ЛАХ.
При синтезе для получения необходимых результатов мы уменьшили К в 100 раз, а Т1 увеличили в 100 раз. Вычисленное значение w0 совпадает с реальным.
2. Моделирование скорректированной ЛАХ
При синтезе для получения необходимых результатов мы уменьшили К в 1000 раз, а Т1 и Т увеличили в 1000 раз. Вычисленное значение w0 совпадает с реальным.
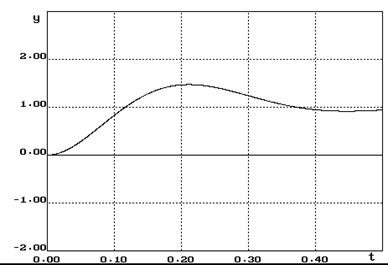
Реакция системы на входное воздействие вида: f =1(единичное воздействие):
Проверим реакцию системы на синусоидальное входное воздействие:
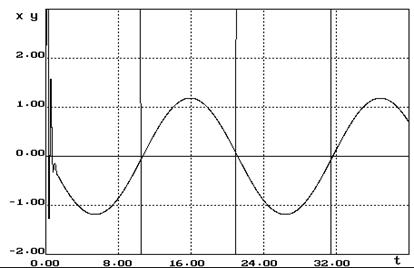
Из графика видно, что система выполняет условие по точности, то есть ошибка не превышает величины 2 мкм.
Следовательно, спроектированная САРФ удовлетворяет всем требованиям, поставленным в задании.
Библиографический список
1. Бесекерский В.А., Попов Е.П. “Теория систем автоматического регулирования”. М., Наука,1975.
2. “Основы автоматического регулирования и управления”. Под ред. Пономарёва В.М., Литвинова А.П., Высшая школа, 1974.
3. “Теория автоматического управления”. Под ред. Воронова А.А. Высшая школа,1986.
4. “Лекции по основам теории управления”. Виноградов Ю.Л., РГРТА, 2002
5. Микропроцессорные системы автоматического управления./Под ред. Бесекерского В.А. Л., Машиностроение, 1988.
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем