Система автоматического регулирования фокусировки пятна
Во всех этих методах при выделении и формировании сигналов ошибки высокочастотные составляющие сигнала с фотоприемника интереса не представляют. Сигнал с фотоприемника поступает на низкочастотный фильтр, который подавляет высокочастотные колебания, обусловленные питами или отверстиями. Можно сказать, что питы так быстро движутся перед объективом, что сливаются в единую дорожку усредненной проме
жуточной интенсивности.
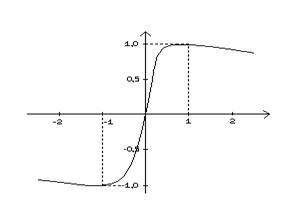
При использовании метода ножа Фуко бипризма размечается при согласованном состоянии в фокусе. Это позволяет увеличить крутизну характеристики сигнала расфокусировки, которая приведена на рис.3.
 UФ
UФ
х[мкм]
Рис.3. Характеристика сигнала расфокусировки, полученная методом ножа Фуко.
При использовании любого метода определения ошибки фокусировки, датчик положения можно условно представить в виде схемы, приведенной на рис.4., состоящей из суммирующего усилителя с коэффициентом передачи КУ и фильтра низких частот.
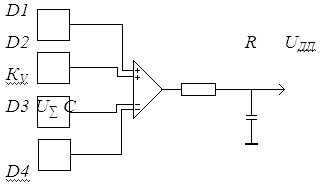
Рис.4. Схема датчика положения.
Уравнения, описывающие эту схему при неограниченной мощности усилителя и бесконечно большом входном сопротивлении следующего каскада, имеют вид:
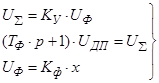 , (1)
, (1)
где: UФ - сигнал расфокусировки;
RУ - коэффициент передачи суммирующего усилителя;
UДП - сигнал на выходе датчика положения;
![]() - постоянная времени фильтра низких частот;
- постоянная времени фильтра низких частот;
![]() - Оператор дифференцирования;
- Оператор дифференцирования;
x – сигнал ошибки фокусировки;
Кф– крутизна характеристики сигнала расфокусировки.
Значение Кф путем линеаризации характеристики в точке начала координат, а Тф скоростью потока данных, считываемых с дорожки диска и может быть выбрана по выражению:
![]() >(3
>(3![]() 5)
5)![]() ;
;
где: л – максимальное расстояние между двумя переходами от пита к ленду в канальном ходе на дорожке диска (обычно л=10);
f – скорость считывания канального хода (потока данных) бит/с.
Wдп(P) = (КуКф)/(Тф+1)
Тф = (4л)/(2pf) = л/(7pf) = 10*10-6/(7*3,14*300) = 1,5*10-9;
Кф = 2,87 (В/мкм);
Wдп(P) = 11,48/(1,5*10-9Т + 1);
Усилитель и усилитель мощности с высокой степенью точности можно представить как безинерционные звенья с коэффициентами передачи kус и kум соответственно. Передаточная функция корректирующего устройства определяется на этапе синтеза САРФ, исходя из требований точности устойчивости и качества переходного процесса.
Сигнал выхода усилителя мощности поступает на исполнительный двигатель, как правило линейный электродвигатель (ЛЭД), работающий по принципу громкоговорителя. Составными частями такого двигателя являются: катушка, постоянный магнит и, возможно, магнитопровод из магнитномягкого железа.
Пригодные к применению конструкции ЛЭД могут быть разделены на две основные группы с подвижной катушкой и с подвижным магнитом.
Конструкция с подвижной катушкой (рис.5) имеет ряд преимуществ и недостатков. Помимо проблем обрыва проводников, подводящих ток к катушке, движущая часть имеет обычно плохой тепловой контакт с окружающей средой (высокое тепловое сопротивление RT). Тепло, выделяющееся в подвижной катушке, приводит к росту температуры всей подвижной части, в частности объектива, что нежелательно. Это в конечном счете приводит к уменьшению среднего значения силы, развиваемой данным ЛЭД.
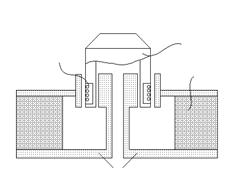
Рис.5. Привод головки с подвижной катушкой.
Достоинством системы с подвижной катушкой является то, что стационарная магнитная система может быть увеличена и, следовательно, с ее помощью можно обеспечить более сильное магнитное поле (высокое значение магнитной индукции В).
Альтернативным решением может быть конструкция с подвижным постоянным магнитом и неподвижной катушкой. В этом случае отвод тепла от катушки не является серьезной проблемой (низкое RT) и максимально допустимая температура катушки Ткат max может быть выше, так как она изолирована от объектива. Но развиваемая ЛЭД сила будет меньше из-за ослабления магнитного поля (низкое В), поскольку объем магнита меньше. Увеличение же магнита нежелательно, так как приводит к возрастанию массы подвижной части, что ухудшает динамические свойства САРФ.
Поэтому в реальных конструкциях применяется ЛЭД с подвижной катушкой.
Поскольку оба типа ЛЭД являются одинаковыми по принципу действия и различаются лишь подвижностью составляющих их частей, уравнения, описывающие их поведение можно представить в виде:
 ,
,
где: L – индуктивность катушки;
R=Rк+Rум - сопротивление катушки и внутреннее сопротивление усилителя мощности;
I - ток катушки;
В – магнитная индукция;
l – Длина проводника катушки в магнитном поле;
F – Сила действующая на катушку;
UУМ – напряжение на выходе усилителя мощности, или в операторной форме:
(Т·Р+1) F=LлэдUум; (2)
где ![]() - постоянная времени ЛЭД;
- постоянная времени ЛЭД;
![]() - коэффициент передачи ЛЭД;
- коэффициент передачи ЛЭД;
l = р dk W;
W – Число витков катушки ЛЭД.
Определим передаточную Функцию ЛЭД:
WЛЭД = LЛЭД/(TP + 1);
Подставим значения:
WЛЭД = 4,71/(5*10-4P + 1).
В общем случае движение подвижной части зависит от воздействий, обусловленных наличием упругих элементов, рассеянием энергии в катушке при ее движении в магнитном поле, особенностей подвески подвижной системы.
Основная цель, стоящая при разработке подвески, обеспечить движение головки только по жестко заданным направлениям. Подвески могут быть с помощью линейных подшипников механического или электромагнитного типа и пружинных гибких направляющих. В первом случае перемещение в направлении регулирования ничем не ограничивается, а в перпендикулярных направлениях предотвращается путем выбора соответствующих подшипников с минимально возможными допусками у механических и максимальной жесткостью у электромагнитных. Тогда с учетом демпфирования в подвесе и диссинации энергии в катушке, уравнения движения подвижной части имеют вид:
![]() ,
,
где ![]() - коэффициент вязкого трения,
- коэффициент вязкого трения,
или в операторной форме
![]() ,
,
где ![]()
![]() .
.
k = 1/0.03 = 33;
T1 = 0.33;
Определим передаточную функцию подвижной головки:
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем