Экономико-математические методы и модели
ì3х1+4х2 £ 12
íx1< 2
îх1 > 0 и х2 > 0
|
|
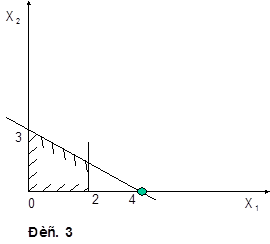
Каждое из неравенств системы определяет полуплоскость, отмеченную на Рис.3 штрихами.
Получен
ный многоугольник является выпуклым, ибо вместе с любыми двумя точками содержит весь соединяющий их отрезок. таким образом, мы видим, что выпуклый многоугольник можно задать аналитически, с помощью системы линейных неравенств. Линейное уравнение с тремя переменными: a11x1+a12x2+a13x3=b1 определяет в пространстве некоторую плоскость, которая рассекает все пространство на два полупространства.
В связи с этим неравенство a11x1+a12x2+a13x3 £ b1 определяет одно из полупространств, к которому принадлежит также и сама граничная плоскость. В общем случае, когда система неравенств совместна, пространство решений образует некоторый выпуклый многогранник - многогранник решений. Частным случаем его могут быть: отдельная грань, ребро или точка. Последнее имеет место, когда система неравенств имеет одно единственное решение. Дальнейшие обобщения приводят нас к рассмотрению m линейных неравенств с n неизвестными. Каждое уравнение ai1x1+ai2x2+ . +ainxn=bi является уравнением некоторой гиперплоскости в n-мерном пространстве, которая как бы рассекает все пространство на два полупространства.
3.3. Значения линейной формы на выпуклом множестве
Предположим, что задана некоторая система из m-линейных неравенств (или уравнений) с n переменными х1, х2, ., хn. Система неравенств в случае совместности определяет некоторое выпуклое множество в n-мерном пространстве, ограниченное или бесконечное (многогранник решений).
Допустим далее, что нам задана некоторая линейная форма от этих переменных, определяющая функцию цели:
¦=c1x1+c2x2+ . +cnxn
В каждой точке выпуклого множества, т.е. для каждого решения нашей системы, линейная форма ¦ принимает определенное значение. Возникает вопрос: в каких точках выпуклого множества линейная форма ¦ достигает своего наибольшего и наименьшего значения, если, конечно, такие существуют? Решение общей задачи линейного программирования сводится, таким образом, к нахождению точек выпуклого множества, в которых заданная линейная форма достигает оптимального значения, и мы ищем такие точки (х1, х2, ., хn), координаты которых неотрицательны. Сформулируем одно важное утверждение, облегчающее решение задачи.
þ В тех случаях, когда множество решений задачи линейного программирования образует выпуклый многогранник, линейная форма достигает оптимального значения в одной из его вершин, в связи с чем последние и называются экстремальными точками.
В общем случае, линейная форма ¦=c1x1+c2x2+ . +cnxn задает гиперплоскость в n-мерном пространстве. При ¦=0 эта гиперплоскость проходит через начало координат. Затем передвигаем эту плоскость параллельно самой себе в направлении вектора P перпендикулярно к этой плоскости. Первая из вершин, в которой линейная форма (гиперплоскость) встретит выпуклый многогранник, будет точкой, в которой линейная форма достигает наименьшего значения, а последняя из вершин - точкой, в которой линейная форма достигает наибольшего значения.
Может случиться, что гиперплоскость окажется параллельной одной из граней или ребер выпуклого многогранника, и тогда линейная форма ¦ достигает своего наименьшего или наибольшего значения в любой точке, лежащей на этом ребре. Но и тогда она достигает эти значения в вершине, лежащей на этом ребре.
Существуют различные методы решения задач линейного программирования. Одним из наиболее простых и наглядных методов решения является графический метод. Этот метод позволяет решать задачи, которые приводят к системам уравнений с двумя или тремя переменными. Большинство задач линейного программирования приводит к системам линейных неравенств с большим числом переменных. Эти задачи решаются симплексным методом.
4. ПРИМЕРЫ ЗАДАЧ ЛИНЕЙНОГО ПРОГРАММИРОВАНИЯ
4.1. Транспортная задача
уголь, добываемый в нескольких месторождениях, отправляется ряду потребителей. нам известно, сколько угля добывается в каждом из месторождений, скажем за месяц и сколько его требуется на тот же срок каждому из потребителей. Известны расстояния между месторождениями и потребителями, а также условия сообщения между ними. Учитывая эти данные. Можно подсчитать, во что обходится перевозка каждой тонны угля из любого месторождения в любой пункт потребления. Требуется при этих условиях спланировать перевозки угля таким образом, чтобы затраты на них были минимальными.
Пусть для простоты заданы всего 4 месторождения М1, М2, М3, М4, причем их ежемесячная добыча составляет a1, а2, а3, а4 тонн угля. Предположим далее, что этот уголь надо доставить в пункты потребления b1, b2, b3, b4, b5, соответственно с ежемесячными потребностями этих пунктов. Будем считать, что общее производство угля равно суммарной потребности в нем (сбалансированность планов): a1, а2, а3, а4 = b1, b2, b3, b4, b5. Задача состоит в определении такого плана перевозок, при котором общая стоимость перевозок была бы наименьшей. Обозначим через x11 количество угля (в тоннах), предназначенное к отправлению из M1 в П1; вообще через xij обозначим количество угля, отправляемого из месторождения Mi в пункт потребления Пj. Схема перевозок примет вид, изображенный в таблице 4.1.
Схема перевозок таблица 4.1
| ПН | в П1 | в П2 | в П3 | в П4 | в П5 | Всего | |
| ПО | отправлено | ||||||
| из Ì1 | х11 | х12 | х13 | х14 | х15 | a1 | |
| из Ì2 | х21 | х22 | х23 | х24 | х25 | а2 | |
| из Ì3 | х31 | х32 | х33 | х34 | х35 | а3 | |
| из Ì4 | х41 | х42 | х43 | х44 | х45 | а4 | |
| Всего привезено | b1 | b2 | b3 | b4 | b5 | ||
Другие рефераты на тему «Экономико-математическое моделирование»:
- Параллельное и последовательное моделирование
- Особенности решения задач в эконометрике
- Область прогноза для однофакторной и двухфакторной модели. Точечный прогноз на основании линейной прогрессии
- Анализ различных методов оценки статистических показателей при типическом отборе
- Имитационное моделирование работы парикмахерской
Поиск рефератов
Последние рефераты раздела
- Выборочные исследования в эконометрике
- Временные характеристики и функция времени. Графическое представление частотных характеристик
- Автоматизированный априорный анализ статистической совокупности в среде MS Excel
- Биматричные игры. Поиск равновесных ситуаций
- Анализ рядов распределения
- Анализ состояния финансовых рынков на основе методов нелинейной динамики
- Безработица - основные определения и измерение. Потоки, запасы, утечки, инъекции в модели