Экономико-математические методы и модели
- модели стохастического программирования, в которых либо в целевую функцию (2.1), либо в ограничения (2.2) входят случайные величины;
-модели теории случайных процессов, предназначенные для изучения процессов, состояние которых в каждый момент времени является случайной величиной;
- модели теории массового обслуживания, в которой изучаются многоканаль
ные системы, занятые обслуживанием требований. Также - к стохастическим моделям можно отнести модели теории полезности, поиска и принятия решений.
þ Для моделирования ситуаций, зависящих от факторов, для которых невозможно собрать статистические данные и значения которых не определены, используются модели с элементами неопределенности.
þ В моделях теории игр задача представляется в виде игры, в которой участвуют несколько игроков, преследующих разные цели, например, организацию предприятия в условиях конкуренции.
þ В имитационных моделях реальный процесс разворачивается в машинном времени, и прослеживаются результаты случайных воздействии на него, например, организация производственного процесса.
þ В детерминированных моделях неизвестные факторы не учитываются. Несмотря на кажущуюся простоту этих моделей, к ним сводятся многие практические задачи, в том числе большинство экономических задач. По виду целевой функции и ограничений детерминированные модели делятся на: линейные, нелинейные, динамические и графические.
þ В линейных моделях целевая функция и ограничения линейны по управляющим переменным. Построение и расчет линейных моделей являются наиболее развитым разделом математического моделирования, поэтому часто к ним стараются свести и другие задачи либо на этапе постановки, либо в процессе решения. Для линейных моделей любого вида и достаточно большой размерности известны стандартные методы решения.
þ Hелинейные модели - это модели, в которых либо целевая функция, либо какое-нибудь из ограничений (либо все ограничения) нелинейны по управляющим переменным. Для нелинейных моделей нет единого метода расчета. В зависимости от вида нелинейности, свойств функции и ограничений можно предложить различные способы решения. Однако может случится и так, что для поставленной нелинейной задачи вообще не существует метода расчета. В этом случае задачу следует упростить, либо сведя ее к известным линейным моделям, либо просто линеаризовав модель.
þ В динамических моделях, в отличие от статических линейных и нелинейных моделей, учитывается фактор времени. Критерий оптимальности в динамических моделях может быть самого общего вида (и даже вообще не быть функцией), однако для него должны выполняться определенные свойства. Расчет динамических моделей сложен, и для каждой конкретной задачи необходимо разрабатывать специальный алгоритм решения.
þ Графические модели- используются тогда, когда задачу удобно представить в виде графической структуры.
3. Некоторые сведения из математики
3.1. Выпуклые множества
Предварительно дадим некоторые понятия, весьма важные для линейного программирования.
þ множество точек называется выпуклыми, если оно вместе с любыми двумя точками содержит отрезок, соединяющий эти точки. Простейшими примерами выпуклых множеств могут служить: отрезок, треугольник, квадрат, некоторые геометрические тела, например, пирамида, куб и т.д.
заметим, что выпуклый многоугольник обладает тем свойством, что весь расположен по одну сторону каждой из прямых, участвующих в ее образовании.
þ выпуклой линейной комбинацией точек М1, М2, . Мn называется любая точка М такая, что:
М=a1M1+a2M2 + . +anMn,
где ai ³ 0 и a1+a2+ . +an=1.
þ Обобщая сказанное выше, можно сказать, что множество точек называется выпуклым, если вместе с любыми своими точками оно содержит и выпуклую произвольную комбинацию этих точек. Поскольку произвольная точка отрезка представляет собой выпуклую комбинацию его концов, то это и означает, что выпуклое множество вместе с двумя данными точками содержит весь соединяющий их отрезок.
Очевидно, что всякая точка выпуклого многоугольника, лежащая внутри его или на одной из сторон, за исключением вершин, может быть представлена как выпуклая линейная комбинация других точек этого многоугольника. Напротив, вершины многоугольника не представляются в виде выпуклой комбинации двух каких-нибудь других точек. В этом смысле вершины многоугольника называют экстремальными точками.
þ прямая линия называется опорной, если она имеет с выпуклым многоугольником, по крайней мере, одну общую точку и весь многоугольник расположен по одну сторону от этой прямой. Через каждую из вершин многоугольника можно провести бесконечное множество опорных линий. В пространстве трех измерений, по аналогии с понятием опорной прямой вводится понятие опорной плоскости.
þ Опорной плоскостью называется всякая плоскость, имеющая с выпуклым многогранником, по крайней мере, одну общую точку, причем такую, что весь многогранник расположен по одну сторону от нее. Опорная плоскость может иметь с выпуклым многогранником общую точку (вершину многогранника), прямую (ребро), и, наконец, общую грань.
3.2. Линейные неравенства
рассмотрим подробнее системы линейных неравенств и покажем, что решение их тесно связано с понятиями выпуклого многоугольника и выпуклого многогранника.
|
|
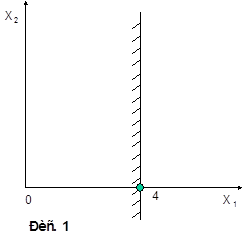
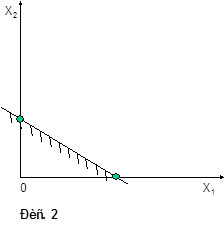
Для начала рассмотрим неравенство с одной переменной величиной x1, например x1<4. Если на плоскости провести прямую х1=4, то она разделит всю плоскость на две части - полуплоскости: в одной из них, а именно слева от прямой х1=4, лежат точки, абсциссы которых меньше 4, а справа от прямой - точки, абсциссы которых больше 4. Таким образом, неравенство x1<4 геометрически определяет полуплоскость (Рис.1). Рассмотрим теперь неравенство с двумя переменными типа 3х1+4х2 < 12. Построим прямую линию 3х1+4х2=12. Разделим обе части уравнения на 12:
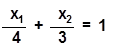
из которого видно, что прямая отсекает по осям отрезки, равные 4 и 3.
Неравенство 3х1+4х2 < 12 определяет собой совокупность всех точек плоскости, лежащих ниже прямой, т.е. в заштрихованной части (Рис. 2).
|
|
Чтобы легче было понять, какую именно полуплоскость определяет то или иное неравенство, мы в левую часть неравенства подставим координаты начала координат, т.е. х1=0 и х2=0. Если неравенство удовлетворяется, то оно определяет ту полуплоскость, в которой лежит начало координат, в противном случае - другую полуплоскость. Пользуясь геометрическими соображениями, найти возможные решения системы:
Другие рефераты на тему «Экономико-математическое моделирование»:
Поиск рефератов
Последние рефераты раздела
- Выборочные исследования в эконометрике
- Временные характеристики и функция времени. Графическое представление частотных характеристик
- Автоматизированный априорный анализ статистической совокупности в среде MS Excel
- Биматричные игры. Поиск равновесных ситуаций
- Анализ рядов распределения
- Анализ состояния финансовых рынков на основе методов нелинейной динамики
- Безработица - основные определения и измерение. Потоки, запасы, утечки, инъекции в модели