Разработка стереовидеокамеры
Введение
Стереовидеокамера применяется для анализа различных трехмерных объектов. Различают стереосистемы пассивного и активного типов. Пассивный принцип стереоанализа дает несомненные преимущества устройствам этого типа, но требует более сложных алгоритмов обработки принятых сигналов и подвержен воздействию помех, которые снижают достоверность получаемой информации. Активные стере
осистемы в значительной степени свободны от этого недостатка. Но использование стереосистем пассивного типа позволяет вести наблюдение скрытно от объекта, т.е. не может быть обнаружено.
Основной проблемой стереоскопических систем при определении дальности является нахождение сопряженных точек в изображениях, формируемых каждой из стереоскопических пар. Особенно остро эта проблема стоит при анализе неизвестных образов объектов. Вследствие этого снижается эффективность алгоритмов определения сопряженных точек, и нужно разрабатывать более сложные алгоритмы. Чтобы преодолеть трудности, возникающие при автоматической обработке и интерпретации трехмерной информации, формируемой в стереосистеме телевизионного типа, используют специальную подсветку. Стереоскопические системы телевизионного типа с использованием различных типов структурированной подсветки относят к активным стереоанализаторам. В настоящее время созданы бинокулярные системы со сканированием лазерным пучком, совершающим строчно-кадровое сканирование пространства предметов, со сканирующим лазерным плоским пучком, совершающим одномерное сканирование.
Стереоскопические системы телевизионного типа находят применение в автоматических системах навигации подвижных роботов, а также в железнодорожных вагонах-лабораториях для испытания контактной сети, а также измерения расстояния от стенки вагона до внешних объектов (стенок тоннеля, стен домов, столбов и т.д.). Это расстояние не должно быть меньше допустимого, поэтому на пути следования поезда проводятся измерения этого расстояния. Именно для решения этой проблемы и будет разрабатываться пассивная стереоскопическая оптическая система, описанная в данной работе. Тем же способом проводят измерения высот подвески, зигзага и выноса группы контактных проводов, высоты и отклонения в плане отходящих проводов.
Восстановление трехмерной структуры сцены (ТСС) является одной из важных задач технического зрения, ставшей особенно актуальной с созданием робототехнических устройств, способных ориентироваться в трехмерном пространстве и систем безопасности, использующих трехмерные образы объектов.
В обычном изображении трехмерного пространства информация о расстоянии до различных элементов сцены проявляется только в виде косвенных признаков: через относительные размеры объектов, затенение одних объектов другими, различной освещенностью и т.д. Один из способов получения информации о глубине состоит в регистрации нескольких изображений сцены под различными ракурсами. В этом случае точки сцены дают изображения, относительное положение которых зависит от расстояния до точки наблюдения, сопоставляя которые, можно реконструировать ТСС.
Систему, предназначенную для регистрации нескольких изображений сцены под различными ракурсами, называют стереоскопической системой. Простейшим примером стереоскопической системы являются две одинаковые камеры, расположенные так, что их оптические оси параллельны, а прямая, проходящая через оптические центры, перпендикулярны оптическим осям. Эта прямая называется базовой линией, а ее отрезок, заключенный между оптическими центрами – базой b.
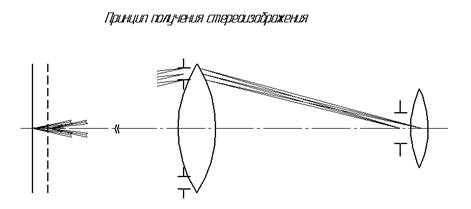
Рис. 1
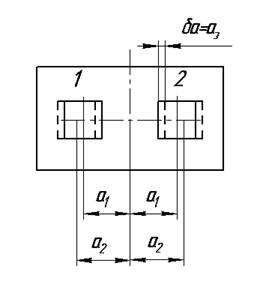
Рис. 2
Принцип получения стереоизображения можно рассмотреть на рис. 2. О величине расстояния до объекта можно судить по смещению изображения на величину а1 от оптической оси матрицы. При наличии каких-либо неровностей или выступов в плоскости объекта изображение на матрице смещается относительно первоначального на величину da и составляет а2 от оптической оси матрицы. Таким образом, по величине смещения da можно судить о поперечном размере выступа или неровности в плоскости объекта.
1. Теоретическая часть
a. Оптическая схема
Оптическая схема стереовидеокамеры показана на рис. 3
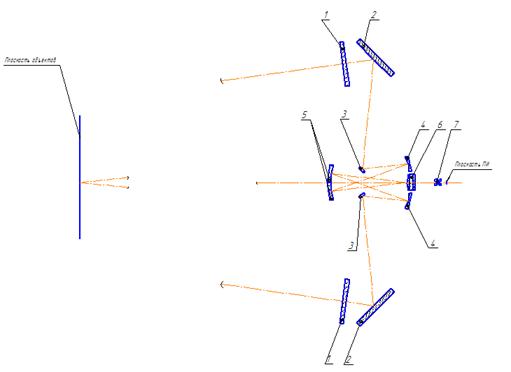
Рис. 3
Основными элементами стереовидеокамеры являются:
- Входное окно 1
- Наклонные плоские зеркала 2 и 3
- Сферические зеркала 4 и 5, (наклонные плоские и сферические зеркала служат для увеличения оптического пути с целью сопряжения входного и выходного зрачков)
- Оптическая система 6
- Камера, состоящая из приемного объектива 7 и ПЗС-матрицы
Изображение регистрируется через две различные зоны входного зрачка. Далее происходит отражение излучения на зеркалах 2, 3, 4 и 5, после чего излучение попадает в передающую оптическую систему 6 и переносится на плоскость ПИ регистрирующей приемной системой 7. Расстояние между центрами зеркал 2 называется базой B. Расстояние от последнего элемента приемной оптической системы 7 до приемника излучения юстируется в пределах 0,1 мм с погрешностью 0,01 мм, а расстояние между двумя зеркалами юстируется в пределах 1 мм с погрешностью 0,1 мм.
Предельная дальность измерения составляет 1500 мм.
Основные характеристики оптической системы:
– входной зрачок системы
– угловое поле
– фокусное расстояние
b. Параметры источника излучения [5, 6]
Источником излучения для нашей системы является излучение, отраженное от объекта, чаще всего солнечное. Т.к. у нас пассивная система, то подсветка объекта не требуется.
Минимальная освещенность объекта составляет![]() лк (измерена для диффузного объекта с коэффициентом отражения
лк (измерена для диффузного объекта с коэффициентом отражения![]() )
)
Разрабатываемая система работает при следующих условиях:
- дальность обнаружения объектов![]() м,
м,
- коэффициент пропускания атмосферы ![]() ,
,
- объекты – диффузные, с коэффициентами отражения от![]() до
до ![]() .
.
Излучатель конечной площади занимает часть углового поля оптической системы. Энергетическая характеристика такого излучателя служит яркость Le. Можно воспользоваться известной формулой для определения потока, приходящего на входной зрачок от элемента с площадью ΔА.
Для круглого зрачка пределы интегрирования по σ составляют от 0 до σа, по ψ они равны от 0 до 2π. При косинусном излучателе Le = const и тогда
![]()
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем