Алгоритмы сбора и предварительной обработки измерительной информации
Аналогично могут компенсироваться влияния давления, влажности, изменения питания (не обязательно электрического), электрических и магнитных полей и многих других физических факторов. Для измерения влияющих факторов должны использоваться специальные ИК, что не является спецификой ИИС, поскольку при использовании неавтоматизированных СИ поправки определялись с учетом результатов измерения влияющи
х факторов с помощью других СИ. Алгоритмы введения этих поправок индивидуальны в каждом конкретном случае и определяются в ходе специальных исследований.
Если исследуемые физические величины рассматриваются как единое целое, необходимо одновременное получение их отсчетов. Однако из-за временных сдвигов в ИК отсчеты этих величин xji могут браться в различные моменты времени ty. Для привязки их к одинаковым моментам времени tji можно использовать линейную интерполяцию наблюдаемых функций
 (3)
(3)
Два последовательных отсчета измеряемой величины, входящих в (3), выбираются таким образом, чтобы tji < tj < tj,i +1.
В принципе для интерполяции в (3) могут использоваться и полиномы более высоких степеней, если отсчеты достаточно разнесены во времени.
Для отдельных областей измерения могут применяться специфичные алгоритмы предварительной обработки, используемые во всех ИИС данной области. Например, при геометрических измерениях измерительный наконечник перемещается по эквидистанте относительно исследуемой поверхности. Эквидистанта — линия (поверхность), все точки которой равноудалены от данной линии (поверхности), то есть они находятся на некоторых нормалях к исследуемой поверхности на равных расстояниях от нее. Эквидистанта к прямой (плоскости) — прямая (плоскость), к окружности (сфере) — окружность (сфера). Во всех остальных случаях форма эквидистанты отлична от формы исходной линии или поверхности.
Поэтому собранный массив данных должен пересчитываться в координаты точек поверхности. Поскольку за счет конечного диаметра измерительного наконечника происходит специфичное сглаживание исследуемой поверхности, полное восстановление исследуемой поверхности не всегда возможно.
При исследовании температуры малых объектов иногда приходится корректировать собранные данные с учетом теплоемкости чувствительного элемента датчика, контактирующего с объектом. При электрических измерениях иногда посредством поправок компенсируется влияние внутреннего сопротивления датчиков. При измерении характеристик радиосигналов на сверхвысоких частотах приходится вводить поправки с учетом коэффициентов отражения. Подобные примеры можно привести для многих областей измерения.
Нелинейность ИК является одним из частных источников систематической мультипликативной погрешности. Поэтому линеаризацию характеристик можно рассматривать как частный случай введения поправок. Однако введение этих поправок базируется на столь специфичном алгоритме, что его рассматривают как самостоятельную процедуру.
Нелинейность любого элемента ИК и всего канала характеризуется максимальным отклонением характеристики от прямой, соединяющей граничные точки рабочего диапазона. Наибольший вклад в нелинейность вносят первичные и вторичные измерительные преобразователи. Однако некоторую нелинейность могут вносить АЦП и каналы связи.
Очевидно, что нелинейность можно устранить, если она стабильна. Только в этом случае вызываемую ею погрешность можно рассматривать как систематическую и компенсировать ее, вводя поправки путем линеаризации. Если вид характеристики преобразования достаточно быстро меняется в процессе эксплуатации ИИС, устранить нелинейность практически невозможно, поскольку вносимая погрешность будет близка к случайной. При медленном изменении формы характеристики, когда ее существенные изменения происходят за недели или месяцы, возможна компенсация ее нестабильности за счет периодического повторения режима линеаризации (настройки).
При аналоговых методах обработки для компенсации нелинейности измерительных преобразователей использовались различные электронные компоненты, работающие на нелинейных участках своих характеристик: лампы, диоды, транзисторы. Таким способом удавалось уменьшить нелинейность в полтора-два раза. Линеаризация проводилась для усредненных характеристик, подстройка для конкретных экземпляров преобразователей была сложна. Поэтому нелинейность измерительных преобразователей являлась основным фактором, ограничивавшим их точность. Ситуация принципиально изменилась с использованием для линеаризации цифровых устройств.
Применяются два основных алгоритма линеаризации:
- аппроксимация характеристики преобразования полиномом (степенным, гармоническим и др.);
- кусочно-линейная аппроксимация.
Оба метода эффективно устраняют нелинейность, если характеристика изменяется достаточно плавно (вторая производная меняет знак в рабочем диапазоне малое число раз). Нелинейность, обусловленная физическими эффектами, заложенными в принцип работы преобразователя, имеет именно такой плавный характер. Неплавная нелинейность обусловлена особенностями конструкции и качеством изготовления. Например, дефекты намотки катушек индуктивных преобразователей приводят к неплавной нелинейности. (Интервал перемещений, в пределах которого происходит изменение знака второй производной, близок к величине шага намотки, то есть составляет несколько сотых долей миллиметра.) Устранить такую нелинейность практически невозможно, поскольку для этого потребуются или полиномы очень высоких степеней, или очень большое число отрезков кусочно-линейной аппроксимации.
Оба метода имеют свои преимущества и недостатки. Однако более широкое применение нашел второй метод, как более простой и более эффективно устраняющий локальную нелинейность.
При первом подходе ищутся параметры функции известной формы (например, степенного полинома), при которых точки (xj; Cj) наименее удалены от этой функции.
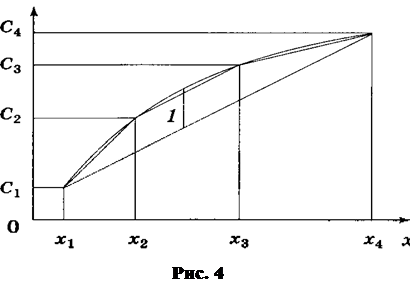
Кусочно-линейная аппроксимация (на рис. 4 длина отрезка 1 характеризует нелинейность) заключается в том, что нелинейная характеристика канала заменяется отрезками прямых, проходящих через экспериментально полученные точки (xi; Ci) и (хi + 1; Ci + l), где i = 1, п. Обычно число точек равно 6 . 11, что соответствует аппроксимации пятьюдесятью отрезками прямых.
Координаты узлов аппроксимации должны быть измерены с погрешностями, в несколько раз меньшими допускаемой погрешности ИК, аналогично тому, как это делается при калибровке или поверке.
С учетом вида аппроксимации характеристики преобразования обратное преобразование, обеспечивающее линеаризацию, также будет линейно-кусочной функцией
![]() (4)
(4)
Очевидно, что с увеличением числа линейных отрезков обеспечивается более высокая линейность. Однако при этом возрастают требуемый объем памяти (что не очень существенно) и объем экспериментальных работ по получению исходных данных.
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем