Алгоритмы сбора и предварительной обработки измерительной информации
Точно так же нецелесообразно брать отсчеты с периодом существенно меньшим, чем постоянная времени (время памяти) измерительных преобразователей. Однако эта ситуация принципиально отличается от предыдущей и означает, что задачи выбора частоты дискретизации и обеспечение требуемого быстродействия ИК должны решаться совместно. Медленность исследуемых функций является отражением реальных свойств ИО
, а их искажения за счет инерционности ИК и обусловленной этим низкой частотой отсчетов приводит к увеличению аппаратных погрешностей. Поэтому быстродействие ИК должно быть согласовано с возможной скоростью изменения измеряемых величин, и только после этого может выбираться рациональная частота отсчетов.
Соседние отсчеты функции могут существенно отличаться друг от друга, однако их разность по абсолютной величине в среднем меньше абсолютных значений самих отсчетов. Это обстоятельство используется для сжатия данных при их передаче по цифровым каналам связи (разностная модуляция). В этом случае первый отсчет передается полностью, а в последующие моменты передаются разности xj – xj-1 .Очевидно, что такая передача информации менее помехоустойчива, чем передача отсчетов функции, поскольку сбой при передаче одной разности не устраняется при передаче следующих значений. Однако в силу достаточно высокой помехоустойчивости цифровых каналов связи за счет использования помехоустойчивых кодов эта погрешность оказывается достаточно малой. При разностной модуляции значения tj могут быть как равномерными, так и неравномерными.
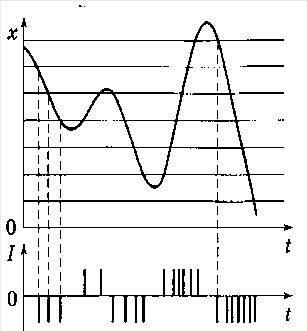
Разновидностью разностной модуляции является дельта-модуляция, которая в принципе предполагает неравномерность моментов отсчетов. Сущность дельта-модуляции состоит в том, что по каналу связи передается один бит информации в момент времени, когда измеряемая величина изменилась по уровню на одну дискрету. Передаваемый бит содержит информации о знаке изменения (рис. 2).
В этом случае отсчеты будут следовать тем чаще, чем больше скорость изменения измеряемой величины. С этой точки зрения дельта-модуляцию можно рассматривать как адаптивную процедуру сбора и передачи данных. При этом разность между дискретным и непрерывным представлениями функции не будет превышать одной дискреты.
Очевидно, что передача данных со сжатием информации требует наличия в ИК вычислительных устройств, определяющих разности и вырабатывающих командные сигналы для передачи данных. Более подробные сведения о разностной модуляции, дельта-модуляции и других способах сжатия данных при их передаче можно найти в [29].
Самый простой алгоритм сбора информации об изменяющихся во времени величинах — считывание по команде с ЭВМ или извне отсчетов со всех ИК. Такой алгоритм применим как для периодических, так и для непериодических отсчетов. Исключение составляет передача информации дельта-модулированным сигналом, когда время отсчета определяется передающим устройством. Если функции xi(t) исследуются независимо друг от друга, то синхронность отсчетов всех функций не важна. Если же эти функции рассматриваются как единое целое, то моменты времени отсчетов должны быть согласованы. При этом может возникнуть необходимость введения поправок, если отсчеты взяты в разные моменты времени. Причиной неодновременности отсчетов может быть конечное время преобразования в АЦП при его работе в мультиплексном режиме, задержки в каналах связи и др.
Теперь остановимся на процедуре сбора первичной информации, когда одна или несколько исследуемых физических величин рассматриваются как функции одной или нескольких других физических величин. Это не всегда означает, что измеряемые физические величины оказались разбиты на два вида: зависимые, присущие непосредственно ИО, и независимые, внешние факторы, влияющие на свойства этого объекта. Например, при исследовании формы поверхностей деталей любая из пространственных координат может рассматриваться как функция двух других координат. Однако все три координаты одинаково описывают свойства исследуемой детали.
При исследовании зависимости сопротивления резистора от температуры сопротивление действительно является свойством ИО, а температура — внешним влияющим фактором. Однако и в этом случае с точки зрения сбора и обработки первичной информации обе физические величины ничем не отличаются. Необходимо измерять температуру самого резистора, а не нагревателя и не окружающей среды. Более того, нагрев можно производить, пропуская через резистор достаточно большой ток, и измерять величину этого тока, падение напряжения на резисторе и его температуру. При этом также следует иметь в виду, что полученная функция зависимости сопротивления от температуры описывает свойства ИО, то есть присуща именно ему.
Из приведенных примеров можно сделать вывод, что при исследовании функциональных зависимостей между измеряемыми физическими величинами их разбиение на аргументы и функции довольно условно, хотя в отдельных случаях измеряемые величины можно разбить на присущие непосредственно объекту и на внешние влияющие факторы. Однако по отношению к алгоритмам сбора и обработки первичной информации это разбиение несущественно.
Для исследования функциональных зависимостей необходима достаточно большая совокупность отсчетов измеряемых физических величин. Желательно, чтобы она охватывала всю область возможных значений величин при реальной эксплуатации объекта. Для сбора этой информации могут использоваться пассивный и активный методы.
При пассивном методе по команде с ЭВМ считываются значения всех физических величин ИО. Естественно, при этом мы получаем только по одному значению каждой величины, чего недостаточно для изучения функций. Получить большее число значений можно либо исследуя однотипные объекты, либо предполагая, что исследуемые величины изменяются во времени, и произведя несколько считываний в разные моменты времени. Пассивный метод мало эффективен и используется только в тех случаях, когда активный метод, предусматривающий воздействие на ИО, физически невозможен. Пассивный метод относительно эффективен при исследовании зависимости физических величин от пространственных координат при использовании так называемых многоточечных систем, когда исследуемые величины измеряются в разных точках пространства. В этом случае для получения достаточно большего объема данных необходимо иметь большое количество однотипных ИК.
При активном методе значения величин, рассматриваемых как аргументы, изменяются путем внешних воздействий на ИО. При исследовании величин, зависящих от пространственных координат, активное воздействие предполагает перемещение первичного преобразователя относительно объекта по одной, двум или трем координатам. При этом, естественно, предполагается, что свойства ИО не изменяются во времени. В зависимости от формы ИО система координат, в которой производится сбор первичной информации и, соответственно, перемещение датчика, может быть декартовой, полярной, цилиндрической или сферической. Обычно одна координата изменяется непрерывно, а другие (одна или две) изменяются дискретно с достаточно большим шагом. Значения непрерывно изменяемой координаты и функции считываются через заданные интервалы перемещения по этой координате или через заданные интервалы времени. Время в этом случае не является аргументом для какой-либо физической величины, а служит вспомогательной переменной. Очевидно, что в этом случае базирующее устройство должно иметь привод, обеспечивающий необходимые перемещения. Такое непрерывное изменение одной из координат в процессе сбора информации иногда называют сканированием. Более часто сканирование используется при бесконтактных методах, восходя к исходному пониманию этого термина в радиолокации.
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем