Система управления установкой для измерения влажности и давления
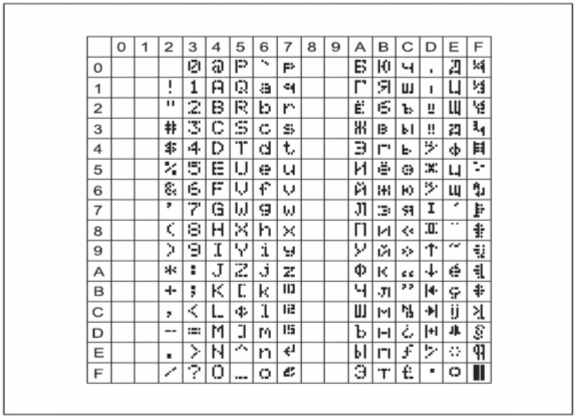
Таблица 2.20 – Таблица кодов символов контроллера Epson, набор «Russian»
Несколько слов о процессе инициализации ЖКИ-модуля. Производитель контроллера рекомендует выполнять следующую последовательность действий для инициализации. Выдержать паузу не менее 15 мс между установлением рабочего напряжения питания (>
; 4,5 В) и выполнением каких-либо операций с контроллером. Первой операцией выполнить команду, выбирающую разрядность шины (это должна быть команда $30 независимо от того, какой разрядности интерфейс вы собираетесь использовать в дальнейшем), причем перед выполнением этой операции не проверять значение флага BF. Далее опять выдержать паузу не менее 4,1 мс и повторить команду выбора разрядности шины, причем перед подачей команды вновь не производить проверку флага BF. Следующим шагом необходимо вновь выдержать паузу, на этот раз 100 мкс, и в третий раз повторить команду установления разрядности шины, вновь без проверки BF. Эти три операции являются инициализирующими и призваны вывести контроллер в исходный режим работы (то есть перевести в режим работы с 8-ми разрядной шиной) из любого состояния. Следом за ними нормальным порядком (без выдерживания пауз, но с проверкой флага BF) выполняется инициализация режимов работы с выдачей инициализирующей последовательности, аналогичной указанной в таблице 2.19 (содержащей в том числе команду выбора необходимой разрядности шины).
Необходимо помнить, что когда Вы объявляете режим работы с 4-х разрядной шиной, то есть выдаете команду $20, то делаете это обычно из 8-ми разрядного режима, который устанавливается автоматически после подачи напряжения питания, а значит вы не сможете адекватно объявить необходимое значение флагов N и F, располагающихся в младшей тетраде команды установки разрядности шины. Поэтому команду необходимо повторить в уже установившемся 4-х разрядном режиме путем последовательной передачи двух тетрад, то есть для 4-х разрядного режима образом.
3. Описание функциональной схемы
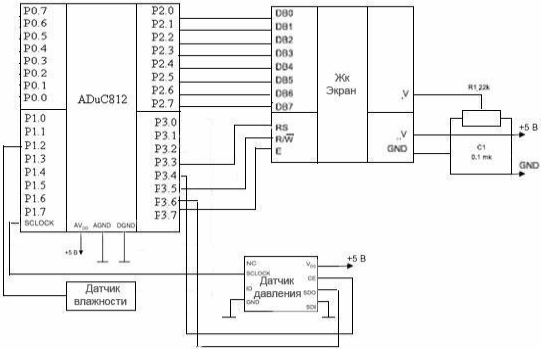
Рисунок 3.1 - Функциональная схема
На рисунке 3.1 представлена функциональная схема СУ датчиками влажности и давления. Её принципиальное отличие от структурной схемы, представленной ранее, заключается в том, что на данном этапе уже выбран микроконтроллер,датчики и Жк дисплей
В данном курсовом проекте был выбран микроконтроллер ADuC812 фирмы Analog Devices. Данный микроконтроллер удовлетворяет следующим требованиям:
наличие встроенного АЦП,
высокая надежность,
высокая степень миниатюризации,
работоспособность в жестких условиях эксплуатации;
достаточная производительность для выполнения всех требуемых функций
Датчик давления реализован в виде MLH050PGP06A
Датчик влажности в виде HIH-3602-L.
Для отображения многосимвольной информации используется ЖК-дисплей, который будет обмениваться информацией через порт P2, а управление передачей будет производится используя 3 выхода в порту P3.
4. Проектирование алгоритма работы
Основной алгоритм работы представлен на рисунке 4.1.
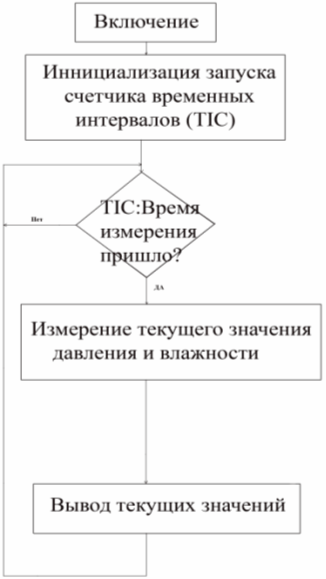
Рис. 4.1
Как видно из рисунка 4.1, замер данных происходят не при каждом цикле работы программы, а через некоторые интервалы времени. Эти интервалы замеряются при помощи счетчика временных интервалов TIC.
5. Разработка программы
В рамках курсового проекта будем разрабатывать фрагмент программы, реализующий часть основного режима работы системы, начинающийся с проверки наступления времени замера давления.
Для хранения различной рабочей текущей информации будем использовать банк регистров №1, для выбора которого при инициализации запишем в регистр флагов (PSW) значение #08h. В регистре R1 будем хранить текущее значение давления.
Для хранения флага режима работы воспользуемся пользовательским флагом регистра PSW (PSW.5 или F0).
Длительность интервалов замера давления определим как константу TCHECK
При начальной инициализации SPI выполним следующие действия [7]:
Установим бит CFG814.0 – для включения выводов P3.6 и P3.7 в режим MISO и MOSI;
Установим бит SPE – для выбора SPI вместо I2C;
Сбросим биты CPOL и CPHA – для согласования режимов обмена по SPI микроконтроллера и датчика давления
Установим бит SPIM - для работы микроконтроллера в Master Mode.
Текст разрабатываемого фрагмента программы представлен в приложении А.
Заключение
В ходе выполнения данного курсовым проектом были получены знания о принципах построения и разработки систем на основе микроконтроллеров семейства 8051, о порядке и процессе выбора элементной базы, и построения единой системы на ее основе. При разработке фрагмента программы были получены навыки в написании программ на ассемблере семейства 8051. При помощи документации-первоисточника от производителя были изучены принципы соединения микроконтроллеров с периферийными устройствами посредством интерфейса SPI, принципы программной и технической реализации обмена данными между устройствами посредством интерфейса SPI. Для реализации в программе работы с длительными интервалами времени была освоена работа с счетчиком временных интервалов TIC.
Список использованных источников
1. .ADuC812 Data Sheet. Источник: www.analog.com,
2. Датчик давления www.sensorica.ru
3. Датчики влажности компании Honeywell. Источник: www.gaw.ru;
4. HIH-3602. Источник: http://www.aly.ru-HIH-3602-L_HON.pdf
5. HDM08111H-L Data Sheet. Источник: www.gaw.ru – 08111hl.pdf
6. HD44780 Data Sheet. Источник: www.gaw.ru – HD44780.pdf.
7. ADuC812 Assembler Examples. Источник: www.analog.com
Приложение А. Текст разрабатываемого фрагмента программы
MOV A, wremia ;wremia - текущее значение времени TIC
CJNE A, TCHECK, ne1
ne1: JB C, loop; ;переход к началу цикла если wremia<TCHECK
readT: MOV SPIDAT, A ;начало обмена данными с SPI
l1: JNB ISPI, l1 ;ожидание конца обмена
MOV A, SPIDAT
MOV R1, SPIDAT ;занесение текущего давления в R1
MOV SPIDAT, A ;повторный обмена данными с SPI - для
l2: JNB ISPI, l2 ;завершения цикла приема 16 бит с датчика
last: CLR TCEN ;остановка TIC, сброс регистров времени
SETB TCEN
MOV A, R1 ;преобразование давления перед выводом
JNB R1.7, ne2
SJMP out
ne2: JB C, out
out: SWAP A ;для последующей записи давления в P1.(4 7)
MOV R2, A
MOV A, P1
ANL A, #0Fh ;обнуление A.(4 7)
ADD A, R2 ;P1.(0 3) не изменены, на P1.(4 7) – Давление.
AJMP loop ;переход к началу основного цикла
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем