Система управления установкой для измерения влажности и давления
Другой вариант – очень простой путь – обмен с ЖКИ-модулем выполняется чисто программными средствами, через порты ввода-вывода управляющей микро-ЭВМ. В дальнейшем мы сконцентрируем внимание именно на этом варианте, так как он позволяет рассмотреть общий случай, абстрагируясь от конкретной системы. Вариант соединения с системной шиной, напротив, требует рассмотрения конкретных устройств, поэтому
в случае необходимости можно рекомендовать изучить временные диаграммы операций чтения и записи, приведенные на рисунках 2.16 и 2.17, а также значения временных параметров, приведенные в таблицах 2.13 и 2.14 и сконструировать соответствующие управляющие схемы.
Нa рисунке 2.15а приведена схема подключения ЖКИ-модуля с 8-ми разрядной шиной к некоторой абстрактной микро-ЭВМ XYZ. Эта микро-ЭВМ содержит два порта: 8-ми разрядный двунаправленный РАО…РА7, к которому подключена шина DBO .DB7 ЖКИ-модуля, и 3-х разрядный РВО .РВ2, к которому подключены линии управляющих сигналов: Е, RS,R/W. На рисунке 2.15б можно видеть схему подключения ЖКИ-модуля к этой же микро-ЭВМ в 4-х разрядном режиме. Обратите внимание, что для обмена в 4-х разрядном режиме используется старшая тетрада шины данных – DB4 .DB7.
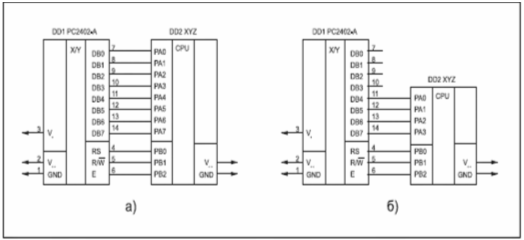
Рисунок 2.15 – Схема подключения
В соответствии с временной диаграммой (рис. 2.16 и 2.17) в исходном состоянии сигнал Е = 0, сигнал R/W = 0, значение сигнала RS – произвольное, шина данных DBO .DB7 в состоянии высокого импеданса (HI). Такое состояние управляющих сигналов (Е и R/W) должно поддерживаться все время в промежутках между операциями обмена с ЖКИ-модулем. Шина данных в эти моменты в принципе свободна, и может использоваться в мультиплексном режиме для каких-либо других целей, например, для сканирования матрицы клавиатуры. Естественно, необходимо позаботиться об исключении конфликтов на шине данных в момент совершения операций обмена с ЖКИ-модулем.
Последовательности действий, которые необходимо выполнять управляющей системе при совершении операций записи и чтения для 8-ми и 4-х разрядной шины приведены соответственно в таблицах 2.11- 2.14.
Таблица 2.11 – Операции записи для 8-ми разрядной шины

Таблица 2.12– Операции чтения для 8-ми разрядной шины
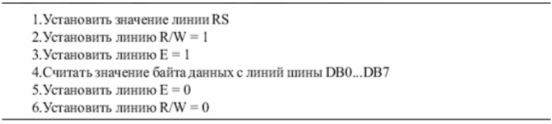
Таблица 2.13– Операция записи для 4-х разрядной шины
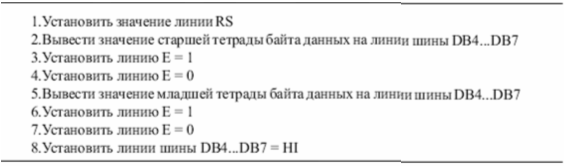
Таблица 2.14 – Операция чтения для 4-х разрядной шины
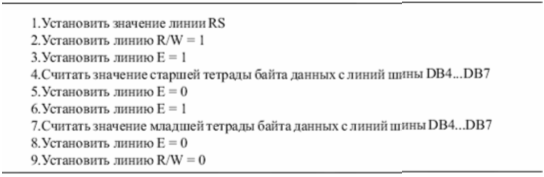
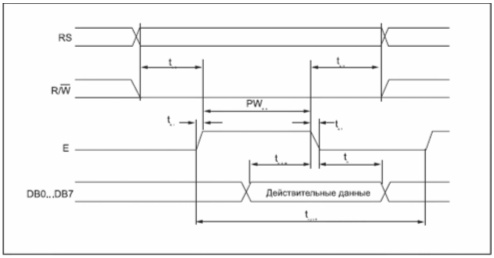
Рисунок 2.16– Временная диаграмма операции записи
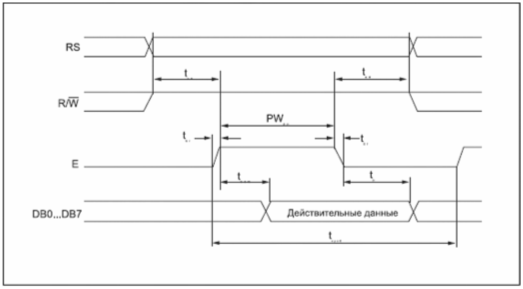
Рисунок 2.17 – Временная диаграмма операции чтения
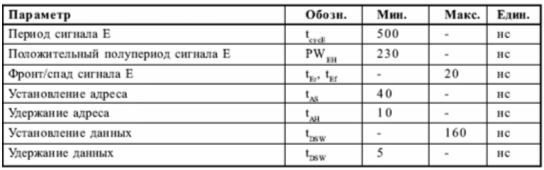
Приведенные в таблицах 2.11-2.14 операции подразумевают, что время выполнения каждого шага составляет не менее 250 нс. При использовании современных быстродействующих микро-ЭВМ это условие может быть легко нарушено, поэтому необходимо тщательно контролировать минимальные значения временных интервалов, чтобы они всегда находились в области допустимых значений, указанных в таблицах 2.15 и 2.16, и при необходимости вводить задержки.
Таблица 2.15 – Значения временных характеристик. Операция записи
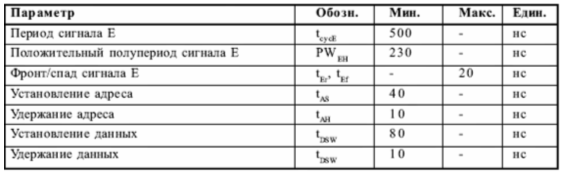
Таблица 2.16 – Значения временных характеристик. Операция чтения
Описанные выше операции записи/чтения байта являются базовыми для осуществления обмена с ЖКИ-модулем. Реализация этих двух операций – единственное, что отличает процесс обмена по 8-ми разрядной шине от обмена по 4-х разрядной шине. Нa основе этих двух операций, реализованных программно (когда модуль подключен к портам микро-ЭВМ), или аппаратно (когда модуль подключен к системной шине), строятся все виды операций программирования и управления.
Несколько слов о подключении ЖКИ-модулей формата 40 х 4. Эти модели содержат два контроллера НD44780 и фактически представляют собой два модуля 40 х 2. Для сокращения числа соединений все сигналы обоих контроллеров соединены параллельно, исключение составляет только сигнал Е, одновременно выполняющий роль тактового сигнала и сигнала выборки микросхемы CS, поэтому обмен с каждым из контроллеров ведется попеременно.
Перед началом рассмотрения принципов управления ЖКИ-модулем, обратимся к внутренней структуре контроллера HD44780, чтобы понять основные принципы построения ЖКИ-модулей на его основе. Эта информация позволит понять способы организации модулей различных форматов с точки зрения программной модели, а также мотивации конструкторов ЖКИ-модулей.
Упрощенная структурная схема контроллера приведена на рисунке 2.18. Можно сразу выделить основные элементы, с которыми приходится взаимодействовать при программном управлении: регистр данных (DR), регистр команд (IR), видеопамять (DDRAM), ОЗУ знакогенератора (CGRAM), счетчик адреса памяти (АС), флаг занятости контроллера.
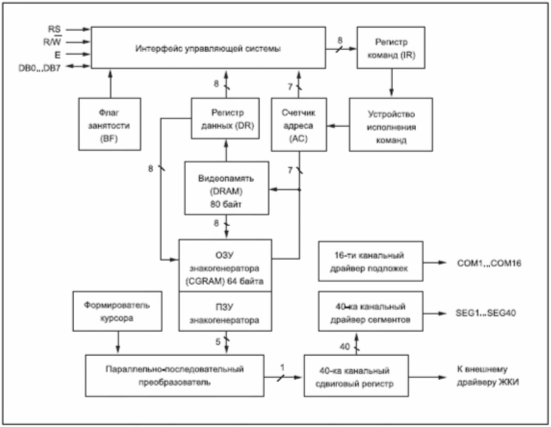
Рисунок 2.18 – Упрощенная структурная схема контроллера HD44780
Другие элементы не являются объектом прямого взаимодействия с управляющей программой – они участвуют в процессе регенерации изображения на ЖКИ: знакогенератор, формирователь курсора, сдвиговые регистры и драйверы (напоминаем, что приведенная схема – упрощенная, и многие не важные для получения общей картины промежуточные элементы на ней опущены).
Управление контроллером ведется посредством интерфейса управляющей системы. Основными объектами взаимодействия являются регистры DR и IR. Выбор адресуемого регистра производится линией RS, если RS = 0 – адресуется регистр команд (IR), если RS = 1 – регистр данных (DR).
Данные через регистр DR, в зависимости от текущего режима, могут помещаться (или прочитываться) в видеопамять (DDRAM) или в ОЗУ знакогенератора (CGRAM) по текущему адресу, указываемому счетчиком адреса (АС). Информация, попадающая в регистр IR, интерпретируется устройством выполнения команд как управляющая последовательность. Прочтение регистра IR возвращает в 7-ми младших разрядах текущее значение счетчика АС, а в старшем разряде флаг занятости (BF).
Видеопамять, имеющая общий объем 80 байтов, предназначена для хранения кодов символов, отображаемых на ЖКИ. Видеопамять организована в две строки по 40 символов в каждой. Эта привязка является жесткой и не подлежит изменению. Другими словами, независимо от того, сколько реальных строк будет иметь каждый конкретный ЖКИ-модуль, скажем, 80 х 1 или 20 х 4, адресация видеопамяти всегда производится как к двум строкам по 40 символов.
Будучи устройством с динамической индикацией, контроллер циклически производит обновление информации на ЖКИ. Сам ЖКИ организован как матрица, состоящая в зависимости от режима работы из 8-ми (одна строка символов 5x7 точек), 11-ти (одна строка символов 5x10 точек) или 16-ти (две строки символов 5x7 точек) строк по 2(Х) сегментов (когда строка насчитывает 40 символов) в каждой. Собственный драйвер контроллера HD44780 имеет только 40 выходов (SEG1 .SEG40) и самостоятельно может поддерживать только 8-ми символьные ЖКИ. Это означает, что ЖКИ-модули форматов до 8x2 реализованы на одной единственной микросхеме HD44780, модули, имеющие большее количество символов, содержат дополнительные микросхемы драйверов, например, HD44100, каждая из которых дополнительно предоставляет управление еще 40-ка сегментами.
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем