Разработка схемы блока арифметико-логического устройства для умножения двух двоичных чисел
Разрабатываемая схема не позволяет применить последовательный счётчик, поэтому будет применяться параллельный (синхронный) счётчик. Так как необходимо считать до восьми, то счетчик будет трёхразрядным. Такой счётчик можно синтезировать как цифровой автомат с кольцевым последовательным перемещением. В этом режиме при поступлении тактового сигнала на триггеры записывается информация с комбинацион
ных схем, преобразующих предыдущее состояние счётчика в последующее. Состояния счётчика приведены в таблице 3.4.
Таблица 3.4
|
N |
Q2 |
Q1 |
Q0 |
D2 |
D1 |
D0 |
|
0 |
0 |
0 |
0 |
0 |
0 |
1 |
|
1 |
0 |
0 |
1 |
0 |
1 |
0 |
|
2 |
0 |
1 |
0 |
0 |
1 |
1 |
|
3 |
0 |
1 |
1 |
1 |
0 |
0 |
|
4 |
1 |
0 |
0 |
1 |
0 |
1 |
|
5 |
1 |
0 |
1 |
1 |
1 |
0 |
|
6 |
1 |
1 |
0 |
1 |
1 |
1 |
|
7 |
1 |
1 |
1 |
0 |
0 |
0 |
![]() (3.11)
(3.11)
![]() (3.12)
(3.12)
![]() (3.13)
(3.13)
Приводим данные выражения к заданному базису:
![]() (3.14)
(3.14)
![]() (3.15)
(3.15)
![]() (3.16)
(3.16)
Схема такого счётчика показана на рис. 3.6.
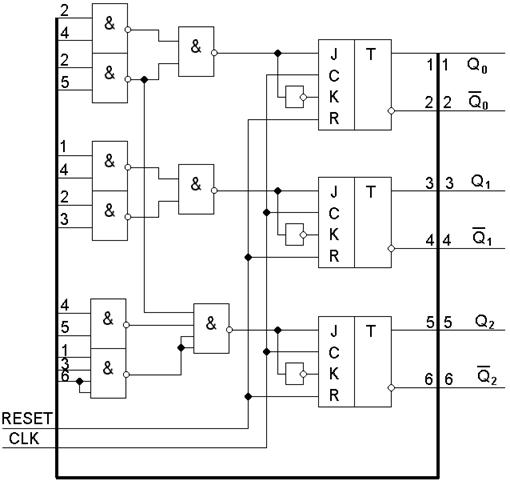
Рисунок 3.6 Схема параллельного счетчика.
Мощность, потребляемую схемой, определим по формуле
![]() . (3.17)
. (3.17)
Подставляя численные значения, получим:
![]() .
.
Максимальное время задержки счетчика в параллельном режиме будет равно сумме времени задержки КС и времени задержки триггера:
![]() . (3.18)
. (3.18)
Максимальный путь сигнала в КС – 2 элемента. Тогда по формуле (3.18):
![]() .
.
В режиме счета быстродействие счетчика будет определяться только параметрами триггера (![]() и
и ![]() ) и логических элементов (
) и логических элементов (![]() ), что в сумме меньше полученного ранее результата. Следовательно, в дальнейших расчетах будем использовать значение
), что в сумме меньше полученного ранее результата. Следовательно, в дальнейших расчетах будем использовать значение ![]() .
.
3.5 Синтез устройства управления
Устройство управления представляет собой цифровой автомат. В зависимости от структуры различают два класса автоматов: автомат Мили и автомат Мура. Различие между ними заключается в том, что в автомате Мили управляющие сигналы зависят как от текущего состояния, так и от входных сигналов, а у автомата Мура - только от текущего состояния. В соответствии с этим можно выделить следующие преимущества : автомат Мили может иметь меньше состояний, чем аналогичный автомат Мура, но автомат Мура более помехозащищённый и надёжный. Таким образом, выбираем в качестве структуры устройства управления автомат Мура.
При синтезе цифрового автомата необходимо определить разрядность регистра состояний и синтезировать комбинационные схемы КС1 и КС2.
Построение автомата Мура начинается с создания графа, описывающего работу схемы. Граф, описывающий работу разрабатываемого устройства управления, представлен на рис.3.8
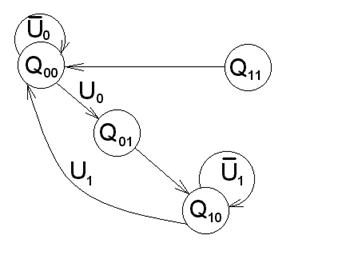
Рисунок 3.8 Граф переходов устройства.
Далее определяем разрядность регистра состояний по формуле:
n = ]log2N[ (3.19)
где n - разрядность регистра состояния;
N - количество состояний в графе.
В нашем случае получим n = 2. Таким образом, для реализации регистра состояний потребуется два триггера.
По графу строим таблицу состояний цифрового автомата (табл. 3.5).
Таблица 3.5
|
Q(t) |
Оповещающ. сигналы |
Управляющие сигналы |
Q(t+1) | |||||||
|
Q1 |
Q0 |
U0 |
U1 |
V1 |
V2 |
V3 |
V4 |
V5 |
D1 |
D0 |
|
0 |
0 |
0 |
X |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
|
0 |
0 |
1 |
X |
0 |
0 |
0 |
0 |
1 |
0 |
1 |
|
0 |
1 |
X |
X |
1 |
1 |
0 |
0 |
0 |
1 |
0 |
|
1 |
0 |
X |
0 |
0 |
0 |
1 |
1 |
0 |
1 |
0 |
|
1 |
0 |
X |
1 |
0 |
0 |
1 |
1 |
0 |
0 |
0 |
|
1 |
1 |
X |
X |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем