Разработка системы непрерывного управления координатами электропривода с заданными показателями качества
Содержание
Введение
1. Определение структуры и параметров объекта управления
1.1 Выбор структуры объекта управления
1.2 Определение параметров объекта управления
2. Разработка алгоритма управления и расчет параметров элементов структурной схемы
2.1 Разработка алгоритма управления
2.2 Расчет параметров элементов структурной схемы
3. Расчет статических и динамиче
ских характеристик
4. Разработка принципиальной схемы и программного обеспечения системы, выбор ее элементов
5. Разработка конструкции блока управления
Заключение
Список литературы
Задание № 16
Введение
Современный электропривод состоит из большого числа разнообразных деталей, машин и аппаратов, выполняющих различные функции. Все они в совокупности совершают работу, направленную на обеспечение определенного производственного процесса. Наиболее важным элементом является система управления электроприводом (СУЭП). От правильного функционирования системы управления зависит состояние объекта управления и правильности отработки заданных параметров.
В настоящее время СУЭП решает несколько важных задач:
Формирование статических механических характеристик электропривода с целью стабилизации скорости (или момента), расширение диапазона регулирования скорости, ограничение перегрузок, формирование адаптивных систем.
Оптимизация переходных режимов с целью повышения быстродействия, снижения динамической ошибки, ограничение ускорения, рывков и т.д.
Целью данного курсового проекта является разработка системы непрерывного управления скоростью рабочего органа в режиме слежения в заданном диапазоне. Также необходимо разработать принципиальную схему, с выбором ее элементов, и предложить вариант реализации блока управления.
1. Определение структуры и параметров объекта управления
1.1 Выбор структуры объекта управления
В качестве структуры объекта управления выбираем эквивалентную двухмассовую систему электропривода (Рис. 1).
Структура объекта управления.
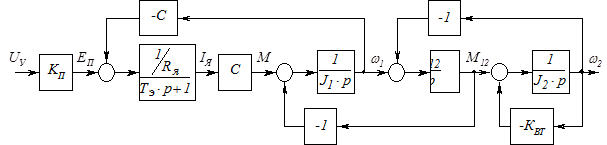
Рис. 1
1.2 Определение параметров объекта управления
В состав объекта управления входят: широтно-импульсный преобразователь; двигатель постоянного тока ДПУ240-1100-3, технические данные которого приведены в
Табл. 1.
Табл. 1. Технические данные двигателя ДПУ240 - 1100 - 3.
|
Момент, Н×м: номинальный максимальный |
3.5 17.5 |
|
Номинальная частота вращения, об/мин |
3000 |
|
Номинальное напряжение, В |
120 |
|
Номинальный ток, А |
12 |
|
КПД,% |
75 |
|
Сопротивление обмотки якоря при 20° С, Ом |
0.53 |
|
Индуктивность обмотки якоря, мГн |
0.53 |
|
Момент инерции, г×м2 |
1.944 |
Двигатели серии ДПУ предназначены для электроприводов постоянного тока металлорежущих станков с ЧПУ и промышленных роботов. Электродвигатели длительно выдерживают номинальный момент при частоте вращения от 0.1 до 5000 об/мин. Двигатели выпускаются со встроенными тахогенераторами постоянного тока типа ТП80-20-0.2 (основные технические данные тахогенератора приведены в
Табл. 2).
Табл. 2. Технические данные тахогенератора ТП80 - 20 - 0.2.
|
Крутизна выходной характеристики мВ/ (об/мин) |
20 |
|
Частота вращения, об/мин: Номинальная Максимальная Минимальная |
3000 6000 0.1 |
|
Погрешность в диапазоне частот 0.1 - 4000 об/мин,%, не более |
0.2 |
Определение параметров:
номинальная частота вращения:
![]() ;
;
максимальная частота вращения в заданном диапазоне слежения:
![]() ;
;
максимальная ошибка слежения:
![]() ;
;
постоянная двигателя:
 ;
;
электромагнитная постоянная времени двигателя:
 ;
;
электромеханическая постоянная времени двигателя:
 ;
;
соотношение постоянных времени двигателя:
 , следовательно, можно принять, что
, следовательно, можно принять, что ![]() ;
;
напряжение двигателя, соответствующее максимальной частоте вращение в заданном диапазоне слежения:
![]() ;
;
принимая, что максимальной скорости диапазона слежения будет соответствовать максимальное задание на скорость, равное ![]() , находим коэффициент передачи преобразователя (представив преобразователь безинерционным звеном, т.к пренебрегаем дискретностью ШИП из-за высокой частоты коммутации ключей:
, находим коэффициент передачи преобразователя (представив преобразователь безинерционным звеном, т.к пренебрегаем дискретностью ШИП из-за высокой частоты коммутации ключей: ![]() ):
):
 .
.
Далее определяем параметры механической части: момент инерции рабочего органа:
 ;
;
период и частота упругих колебаний:
![]() ,
,  ;
;
коэффициент жесткости упругой передачи:
 ;
;
коэффициент вязкого трения:
 ;
;
механическая постоянная времени рабочего органа:
 .
.
2. Разработка алгоритма управления и расчет параметров элементов структурной схемы
2.1 Разработка алгоритма управления
В качестве корректирующего устройства выбираем модальный регулятор, как универсальное устройство управления. Модальное управление реализуется совокупностью линейных обратных связей по переменным состояния объекта управления. Структурная схема всей системы представлена.
Структурная схема проектируемой системы управления электроприводом.
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем