Разработка системы непрерывного управления координатами электропривода с заданными показателями качества
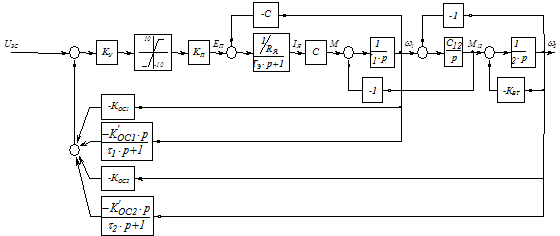
Рис. 2
Линейный (линеаризованный) объект описывается уравнением:
![]() . При модальном управлении:
. При модальном управлении: ![]() .
.
В этих уравнениях:
![]() - вектор переменных состояния;
- вектор переменных состояния;
![]() - вектор входных переменных;
- вектор входных переменных;
А - матрица объекта;
В - матрица входа;
![]() - вектор входных величин в замкнутой через модальный регулятор системе управления;
- вектор входных величин в замкнутой через модальный регулятор системе управления;
К - матрица-строка коэффициентов обратных связей по вектору ![]() .
.
Переходя к операторной форме:
![]() , здесь I - единичная матрица;
, здесь I - единичная матрица;
![]() - характеристический полином.
- характеристический полином.
Распределение корней характеристического полинома будет определять динамику системы.
Синтез модального регулятора заключается в определении матрицы К, обеспечивающей заданное распределение корней.
2.2 Расчет параметров элементов структурной схемы
Рассмотрим в качестве объекта управления систему электропривода (Рис. 1).
Этой структурной схеме соответствуют следующие дифференциальные уравнения:
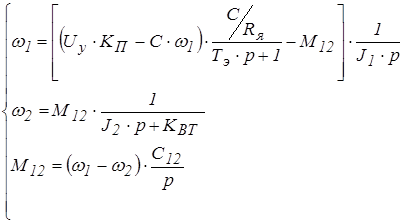 ,
,
 ,
,
 .
.
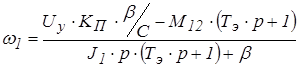
В установившемся режиме работы
(р=0): ![]() .
.
Для замкнутой через модальный регулятор системы:

В данном случае:
 ,
,
 ,
,

За вектор переменных состояния выбираем вектор:
![]() .
.
Тогда

Учитывая, что
 ,
,
 ,
,
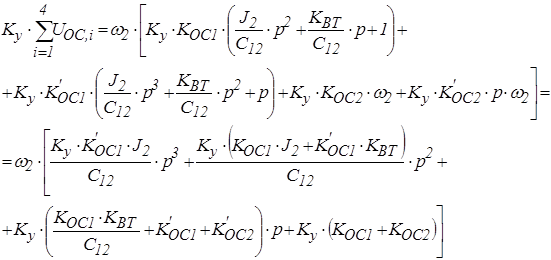
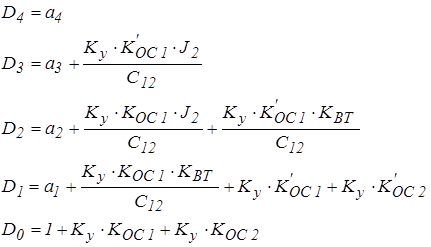
В общем виде

Нормируя
![]() ,
,
вводим базовую частоту
 , относительный оператор
, относительный оператор  .
.
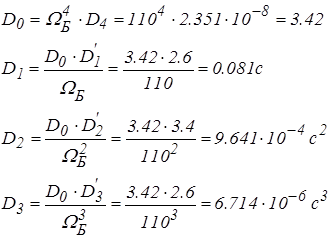
Получим ![]() .
.
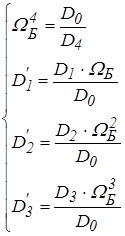
Выбираем ![]() согласно стандартной форме Баттерворта 4-го порядка
согласно стандартной форме Баттерворта 4-го порядка
![]() .
.
Задаваясь временем регулирования определяем базовую частоту
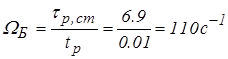 .
.
Далее находим матрицу К коэффициентов обратных связей по переменным состояния
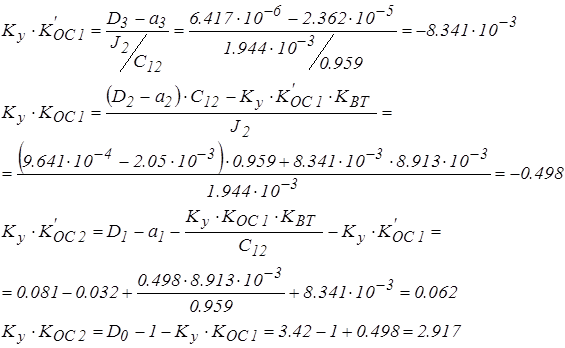
Проведя эксперимент, с помощью пакета MATLAB уточним значения коэффициентов обратных связей, подобрав следующие значения:
![]() ,
,  ,
,  .
.
3. Расчет статических и динамических характеристик
Расчет характеристик произведем с помощью пакета MATLAB 5. Модель MATLAB представлена на Рис. 2.
Ниже приведены результаты моделирования в виде графиков.
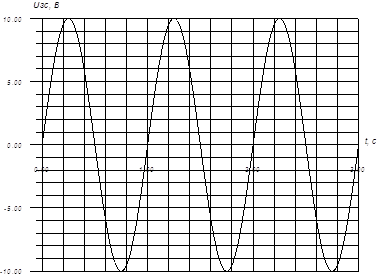
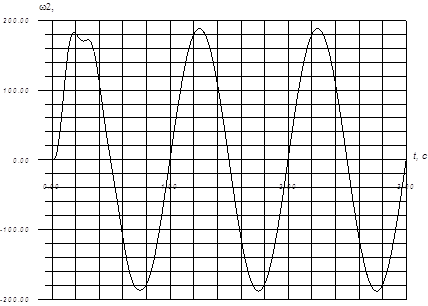
Поведение системы при гармоническом задании, частота 1 Гц амплитуда 10 В (188.5 рад/с).
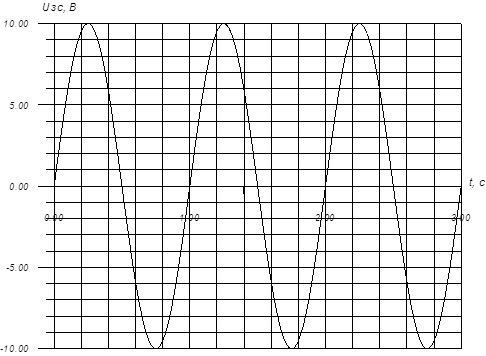
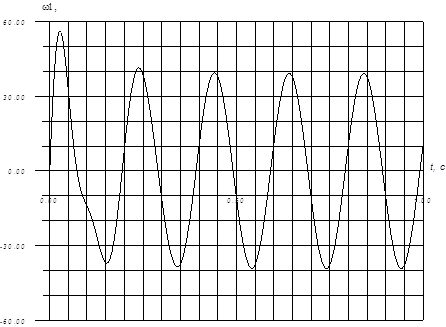
а) Задание скорости
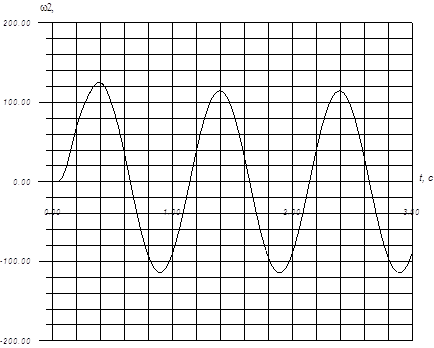
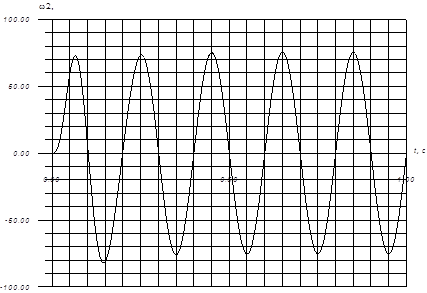
б) Отработка задания
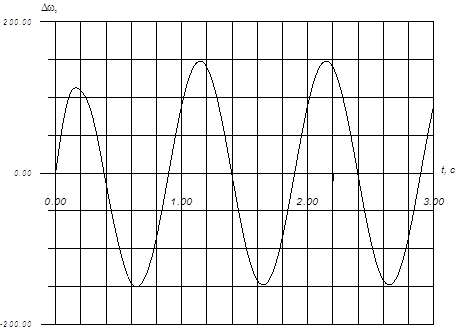
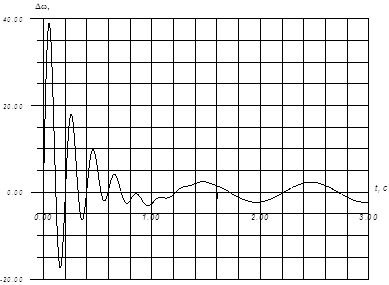
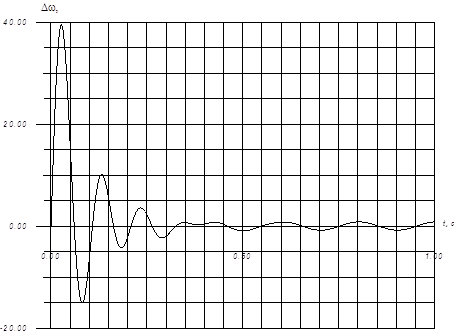
в) Изменение ошибки
Рис. 3
Как видно из приведенных выше графиков ошибка между заданием на скорость и отработкой задания недопустимо велика и, кроме того, между заданием скорости и отработкой задания есть еще и фазовый сдвиг. Для уменьшения ошибки слежения и исключения фазового сдвига скорректируем систему, введя дополнительное задание по производной скорости как показано на Рис. 4.
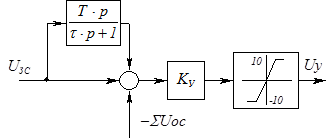
Рис. 4
Проведя ряд экспериментов, установим также, что постоянная времени Т имеет линейную зависимость от частоты гармонического задания скорости. Вид этой зависимости представлен на Рис. 5 ниже.
График зависимости постоянной времени Т от частоты гармонического задания скорости.
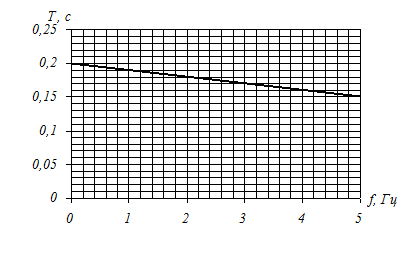
Рис. 5
Далее приведены результаты моделирования уже скорректированной системы. Из этих графиков видно, что требования, указанные в задании на проект выполняются.
Поведение системы при гармоническом задании, частота 1 Гц амплитуда 10 В (188.5 рад/с).
а) Задание скорости
б) Отработка задания
в) Изменение ошибки
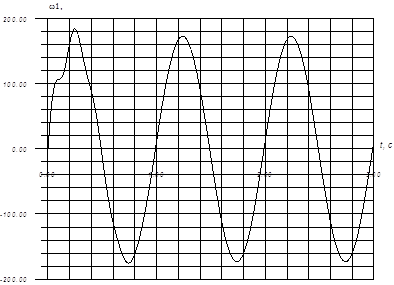
г) Скорость двигателя
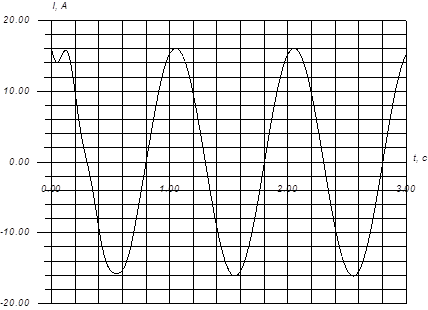
д) Ток двигателя
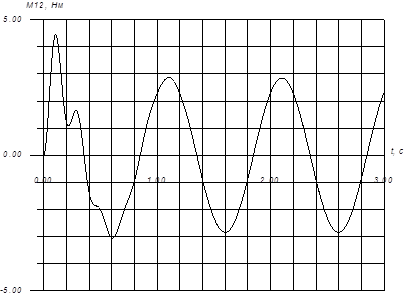
е) Упругий момент
Рис. 6
Поведение системы при гармоническом задании, частота 5 Гц амплитуда 4 В (75.4 рад/с).
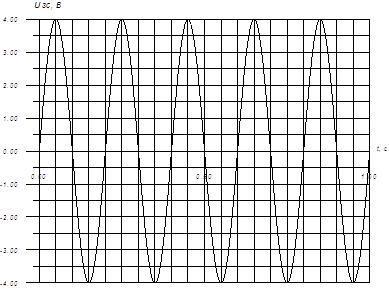
а) Задание скорости
б) Отработка задания
в) Изменение ошибки
г) Скорость двигателя
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем