Разработка системы управления многосвязных систем автоматического регулирования исполнительного уровня
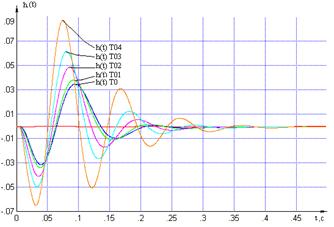
Рисунок 2.4 – Переходные характеристики относительно пар «вх1-вых2» для дискретной МСАР с различными То
Попытка увеличить шаг дискретизации приводит к увеличению максимального отклонения управляемой величины от установившегося значения и времени установления.
Уменьшим шаг дискретизации. Получим переходные характерис
тики для ![]()
![]()
![]()
![]()
![]() (Рисунок 2.5)
(Рисунок 2.5)
Из графиков видно, что уменьшая шаг дискретизации можно добиться уменьшения максимального отклонения управляемой величины от установившегося значения. Оптимальное значение ![]() так как в этом случае наблюдается минимальное значение hmax(t), в то же время достаточно быстро достигается установившееся значение.
так как в этом случае наблюдается минимальное значение hmax(t), в то же время достаточно быстро достигается установившееся значение.
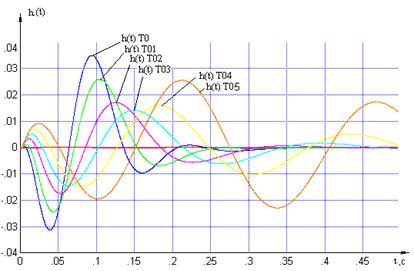
Рисунок 2.5 – Переходные характеристики относительно пар «вх1-вых2» для дискретной МСАР с различными То
Таким образом, при ![]() автономность является менее грубой, при таком значении шага дискретизации свойство автономности можно считать практически выполненным
автономность является менее грубой, при таком значении шага дискретизации свойство автономности можно считать практически выполненным
2.4 Устойчивость цифровой МСАР
Запишем передаточную матрицу приведенной непрерывной части:
 ,
,
 . (2.1)
. (2.1)
Запишем частотную передаточную матрицу ДЗ ПНЧ:
 , (2.2)
, (2.2)
где ![]() , здесь
, здесь  частота дискретизации.
частота дискретизации.
Определим значение частоты дискретизации:
![]()
Получим передаточную матрицу цифрового корректирующего устройства по методу трапеций подстановкой ![]() :
:
![]() (2.3)
(2.3)
Частотно-передаточная матрица разомкнутой системы запишется в виде
![]()
Определитель матрицы возвратных разностей:
![]()
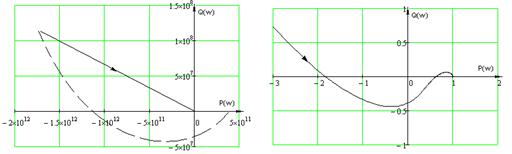
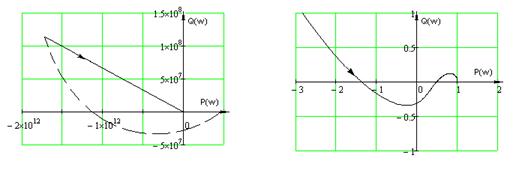
Построим обобщенный годограф Найквиста с помощью MathCAD.
а) б)
Рисунок 2.6 – Обобщенный годограф Найквиста цифровой МСАР
а) общий вид годографа Найквиста
б) построение годографа в области высоких частот;
Разомкнутая система не имеет правых корней характеристического уравнения, поэтому для устойчивости замкнутой МСАР необходимо и достаточно, чтобы обобщенный годограф Найквиста, дополненный на участке разрыва дугой бесконечно большого радиуса, не охватывал точку с координатами (0; j0). Так как обобщенный годограф Найквиста, дополненный на участке разрыва дугой бесконечно большого радиуса, не охватывает точку с координатами (0; j0), то цифровая МСАР при ![]() является устойчивой.
является устойчивой.
Проверим устойчивость цифровой МСАР с помощью обобщенного критерия Найквиста при увеличенном в три раза расчетном значении ![]() :
:
![]()
Передаточную матрицу приведенной непрерывной части, частотную передаточную матрицу ДЗ ПНЧ, дискретную передаточную матрицу цифрового корректирующего устройства определим по формулам (2.1) – (2.3).
Построим годограф Найквиста с помощью программного пакета MathCAD.
а) б)
Рисунок 2.7 – Обобщенный годограф Найквиста цифровой МСАР
а) общий вид годографа Найквиста
б) построение годографа в области высоких частот;
Разомкнутая система не имеет правых корней характеристического уравнения, поэтому для устойчивости замкнутой МСАР необходимо и достаточно, чтобы обобщенный годограф Найквиста, дополненный на участке разрыва дугой бесконечно большого радиуса, не охватывал точку с координатами (0; j0). Так как обобщенный годограф Найквиста, дополненный на участке разрыва дугой бесконечно большого радиуса, не охватывает точку с координатами (0; j0) (см. рисунок 2.17 б)), то цифровая МСАР при ![]() является устойчивой, но запасы устойчивости системы уменьшаются (обобщенный годограф Найквиста при
является устойчивой, но запасы устойчивости системы уменьшаются (обобщенный годограф Найквиста при ![]() пересекает координатные оси плоскости ближе к точке (0; j0), чем при
пересекает координатные оси плоскости ближе к точке (0; j0), чем при ![]() ).
).
2.5 Реакция цифровой МСАР на гармоническое воздействие
Получим реакцию цифровой МСАР по первому каналу на гармоническое воздействие с частотой w1=9.9 и сравним ее с аналогичной реакцией первого сепаратного канала.
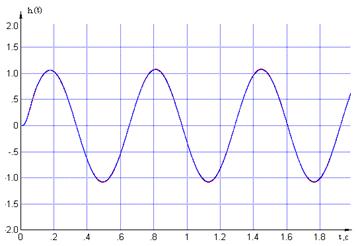
Рисунок – Реакция цифровой МСАР по первому каналу и первого сепаратного канала на гармоническое воздействие с частотой w1=9.9.
Сравним амплитуды колебаний выходного сигнала первого канала цифровой МСАР и первого сепаратного канала:
![]()
![]()
Таким образом, можно сделать вывод о достаточно высокой точности МСАР, так как реакции цифровой МСАР по первому каналу на гармоническое воздействие практически совпадает с реакцией на аналогичное воздействие первого сепаратного канала, амплитуды колебаний выходных сигналов различаются незначительно.
Библиографический список
1. СТО ЮУрГУ 04–2008 Стандарт организации. Курсовое и дипломное проектирование. Общие требования к содержанию и оформлению / составители: Т.И. Парубочная, Н.В. Сырейщикова, В.И. Гузеев, Л.В. Винокурова. – Челябинск: Изд-во ЮУрГУ, 2008, – 56 с.
2. Автоматизированное проектирование систем автоматического управления /.А. Алексанкин, А.Е. Бржозовский, В.А. Жданов и др.; под ред. В.В. Солодовнива. – М.: Машиностроение, 1990. – 335 с.
3. Автоматизированное управление технологическими процессами: учебное пособие / Н.С. Зотов, О.В. Назаров, Б.В. Петелин, В.Б. Яковлев; под ред. В.Б. Яковлева. – Л.: Изд-во ЛГУ, 1988. – 224 с.
4. Александров, А.Г. Синтез регуляторов многомерных систем/ А.Г. Александров. – М.: Машиностроение, 1986. – 272 с.
5. Баранчук, Е.И. Взаимосвязанные и многоконтурные регулируемые системы Баранчук. – Л.: Энергия, 1968. – 267 с.
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем