Разработка системы управления многосвязных систем автоматического регулирования исполнительного уровня
Проектирование МСАР следящего типа, как подсистем исполнительного уровня в составе многоуровневой системы управления представляет собой традиционную для ТАУ задачу динамического синтеза. Однако ее решение имеет весьма существенные особенности, обусловленные факторами многомерности и многосвязности объекта управления ОУ; высоким порядком его математической модели; особенностями оценки качества р
аботы МСАР и др. По этим причинам непосредственное применение традиционных инженерных методов синтеза одномерных следящих СУ оказываются невозможным без их обобщения на многомерный случай. Научные работы в этой области, в основном, посвящены аналитическим методам оптимального синтеза МСАР. Используемые при этом функционалы качества (критерии оптимальности) назначаются, как правило, исходя из условий математической разрешимости задачи, и в большинстве своем имеют обобщенный, абстрактный характер, слабо связанный с инженерными приложениям и требованиями.
Несмотря на большое число публикаций и монографий, в основном двадцатилетней давности, в учебной литературе по теории автоматического управления инженерным методам динамического синтеза МСАР не уделяется должного внимания. Именно этим обусловлен выбор темы исследования.
Цель работы: частичный синтез и исследование многомерной САР исполнительного уровня в составе распределенной системы управления сложным техническим объектом.
Исходные данные. Структурная схема рассматриваемой МСАР, показана на рисунке 1.
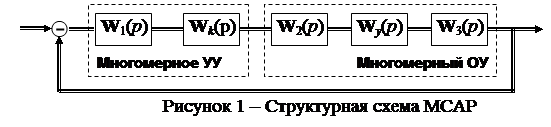 |
Передаточные матрицы (ПМ) линейных МДЗ в составе двумерной МСАР имеют вид:
W1(p)=diag{Wp1(p); Wp2(p)};
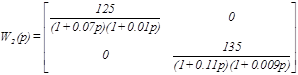
W2(p)=diag{W01(p); W02(p)};
W3(p)=diag (1/p); 1/p)},
где Wpi(p) – подлежащая определению ПФ i-го сепаратного регулятора; i = 1; 2.
W0i(p) = ![]() – ПФ неизменяемой части i-го сепаратного канала;
– ПФ неизменяемой части i-го сепаратного канала;
Wk(p) – ПМ компенсатора (в работе рассматриваются два его варианта):
a)Wk(p) = [E+Wx(p)] – ПМ компенсатора с прямыми перекрестными связями;
b) Wk(p) = [E – Wx(p)]–1 – ПМ компенсатора с обратными перекрестными связями.
Здесь 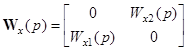 , а Wx1(p) и Wx2(p) – подлежащие определению передаточные функции прямых (или обратных) перекрестных связей в составе последовательного компенсатора, обеспечивающего свойство автономности каналов регулирования.
, а Wx1(p) и Wx2(p) – подлежащие определению передаточные функции прямых (или обратных) перекрестных связей в составе последовательного компенсатора, обеспечивающего свойство автономности каналов регулирования.
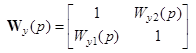 , где
, где  – ПФ перекрестных связей в объекте управления ОУ, а Ky1=15; Ky2=10; Ty1=0.4Ta1; Ty2=1.5Tb2.
– ПФ перекрестных связей в объекте управления ОУ, а Ky1=15; Ky2=10; Ty1=0.4Ta1; Ty2=1.5Tb2.
Таблица 1 – Исходные данные
|
№вар. |
i |
Кi, с-1 |
Tai, с |
Tbi, с |
wсрi |
Mi |
Схема ЦСАР |
|
6 |
1 |
125 |
0.07 |
0.01 |
41 |
1.23 |
a) |
|
2 |
135 |
0.11 |
0.009 |
33 |
1.35 |
1. Синтез и исследование непрерывной МСАР
1.1 Определение ПФ сепаратных регуляторов
Изобразим структурную схему МСАР при отсутствии перекрестных связей в многомерном управляющем устройстве и в многомерном объекте управления (Рисунок 1.1)

Рисунок 1.1 – Структурная схема МСАР при отсутствии перекрестных связей в МУУ и МОУ
Запишем передаточные матрицы с заданными числовыми значениями параметров:
![]() ;
;
 ;
;
 ;
;
Применяя формулы В.А. Бесекерского для типовой «симметричной» ЛАХ, выберем вид и параметры ПФ Wр1(p) и Wр2(p), обеспечивающие заданные свойства сепаратным каналам по точности (коэффициент добротности K=Ki), по быстродействию (wср) и по колебательности (M).
1) Первый сепаратный канал
Изобразим структурную схему первого сепаратного канала (Рисунок 1.2)

Рисунок 1.2 – Структурная схема первого сепаратного канала
Запишем передаточную функцию первого разомкнутого сепаратного канала:
 ; (1.1)
; (1.1)
Определим, обеспечиваются ли заданные в ТЗ свойства сепаратного канала.
Построим ЛАЧХ первого сепаратного канала. Построение проведем на масштабно-координатной бумаге.
Первая асимптота ЛАЧХ с наклоном -20 дБ/дек пересекает ось L(w) в точке 20logK1, что соответствует требованию ТЗ по точности.
Определим частоту среза.
log wср=1.6, wcp=40 рад/с. Она близка к требуемому значению.
Построим АЧХ замкнутого сепаратного канала (Рисунок 1.3), как зависимость модуля частотной передаточной функции замкнутого канала от частоты.
Передаточная функция замкнутого канала определяется формулой
![]() (1.2)
(1.2)
Определим показатель колебательности М, используя формулу
 ; (1.3)
; (1.3)
где N(w) – модуль частотной передаточной функции замкнутого канала.
![]()
Свойства первого сепаратного канала по колебательности не соответствуют заданным в ТЗ.
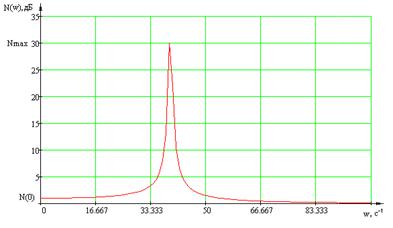
Рисунок 1.3 – АЧХ замкнутого сепаратного канала 1
Определим передаточную функцию сепаратного регулятора.
Типовая «симметричная» ЛАХ на среднечастотном участке имеет наклоны (-40 дБ/дек; -20 дБ/дек; -40 дБ/дек). Сравнивая с заданной передаточной функцией первого сепаратного канала, определим, что желаемая передаточная функция будет иметь вид:
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем