Радиоэлектронные средства навигации и связи
Состав и размещение оборудования АОРЛ-85:
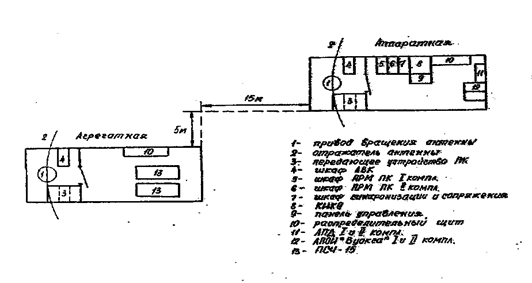
Аппаратура РЛК смонтирована в специальных контейнерах, имеющих все необходимые условия для работы аппаратуры и персонала (вентиляция, кондиционирование воздуха, освещение, пожарная и охранная сигнализация и т.д.), на позиции контейнеры монтируются в сборку
из двух контейнеров, образуя единое техническое здание. Такое конструктивное решение сводит к минимуму строительно-монтажные работы на позиции. Двухлучевая антенная система с помощью специального перекрытия верхнего и нижнего лучей обеспечивает формирование зоны обзора в вертикальной плоскости в диапазоне углов от 0,5 до 45 градусов. Нижний луч, формируемый верхним облучателем и отражателем, работает как на передачу, так и на прием. Верхний луч работает только на прием. Использование информации верхнего приемного луча в ближней зоне позволяет снизить уровень помех от подстилающей поверхности примерно на 20 дБ. В горизонтальной плоскости зона обзора обеспечивается механическим вращением антенны со скоростью 12 или 15 об/мин. Зондирующие сигналы, формируемые двухканальной передающей системой, излучаются одновременно на двух несущихся на 56 Мгц, обеспечивая двухчастотный режим облучения цели. С целью обеспечения необходимого потенциала ПРЛ наряду с минимальной дальностью и высокой разрешающей способностью в каждом периоде повторения излучаются два зондирующих сигнала различной длительности: монохроматический и сложный с внутриимпульсной ЛЧМ. В состав приемной антенны входит аппаратура аналоговой и цифровой обработки сигналов, оценки параметров сигналов (карта помех), некогерентного и когерентного накопления, селекции движущихся целей, вычисления координат.
В ПРЛ организован специальный метеоканал. Прием метеоинформации в режиме работы при круговой поляризации осуществляется с ортогонального входа поляризатора верхнего облучателя антенны. Аппаратура приёма и обработки метеоканала идентична основному каналу. При работе в режиме линейной поляризации метеоинформация извлекается из нулевого доплеровского фильтра основного канала. Программно-вычислительное устройство ПРЛ производит вычисления координат ВС и формирует контуры метеооброзований в шести градациях.
Головной процессор РЛК производит объединение отметок ПРЛ и ВРЛ, трассы целей, выполняя, таким образом, функции вторичной обработки информации. Кроме того, он одновременно используется как процессор автоматизированной системы контроля и управления ЛРК. Вычислительные средства головного процессора имеют полное автоматическое резервирование и способны адаптироваться к перегрузкам.
Автоматизированная система контроля и управления (АСКУ) позволяет как с местного, так и дистанционного (например, с КДП) производить управление режимами работы РЛК, оценку технического состояния, диагностику неисправностей и автоматическую реконфигурацию комплекса (переход на резерв).
Встроенное контрольное оборудование позволяет осуществлять диагностику и поиск неисправностей до типового элемента замены. Высокая степень автоматизации РЛК наряду с его высокой надежностью обеспечивают возможность работы без постоянного присутствия на радиолокационной позиции обслуживающего персонала.
Нормативы ICAO для аэродромных РЛС
Зона обнаружения. Аэродромный радиолокатор должен обнаруживать ВС с эффективной отражающей площадью 15 м2 и более, находящихся в зоне прямой видимости (из точки расположения антенны) в пределах пространства, охватываемого вращением на 360 град вокруг вертикальной оси антенны плоской фигуры. В то же время нормами ICAO рекомендуется увеличить зону обнаружения.

Точность. Погрешность в определении положения отметки цели по азимуту не должна быть больше ±2 град.
Погрешность индикации дальности не должна превышать 5% от действительного расстояния до цели или 150 м в зависимости от того, какая из этих величин больше, т.е.: σmax r ≤ 0,05 r; σmax r ≥ 150 м, где r - наклонная дальность до цели.
Для новых РЛС, спроектированных после принятия норм ICAO, погрешность индикации дальности не должна превышать 3% от действительного расстояния до цели или 150 м и в зависимости от того, какая из этих величин больше.
Разрешающая способность станции по азимуту должна быть не хуже 4 град.
Разрешающая способность по дальности должна быть не хуже 1% расстояния от антенны радиолокатора до цели или 230 м в зависимости от того, какая из этих величин больше, т.е.: δr≤ 0,01 r; δr ≥ 230 м
Скорость возобновления информации. Информация о дальности и азимуте ВС, находящимся в пределах зоны обнаружения радиолокатора, должна возобновляться не реже, чем каждые 4 с.
Основные требования ИКАО для обзорных аэродромных радиолокаторов приведены в таблице 1.
Таблица 1.
|
Характеристика |
Рекомендации ИКАО |
|
Максимальная дальность, км |
46 |
|
Вероятность правильного обнаружения |
0,9 |
|
Вероятность ложных тревог |
10-6 |
|
Эквивалентная площадь цели, м2 |
15 |
|
Угол места, градус |
0,5-30 |
|
Скорость обзора, об/мин |
15 |
|
Разрешающая способность: по дальности, м по азимуту, градус |
230 или 1% от Rmax 4 |
|
Погрешность измерения (СКП) дальности: по индикатору (после цифровой обработки), м |
150 или 0.03% от Rmax |
|
Точность азимута по индикатору, градус |
2 |
|
Коэффициент подпомеховой видимости, дБ 1 этап |
Максимальный |
Эксплуатационно-технические показатели АОРЛ-85.
Первичный канал:
|
№ п/п |
Характеристика |
Единица измерения |
АОРЛ-85 |
|
Первичный канал | |||
|
Диапазон частот |
МГц |
1216 .1278 | |
|
Количество рабочих частот |
шт |
8 | |
|
Дальность действия по ВС с ЭОП 10 м2 (ТУ134, АН-72, ЯК-40) при Робн=0,8 РЛТ=10-6 на высотах от 3000 м до 7500 м |
км |
100 | |
|
Минимальная дальность |
км |
3 | |
|
Ширина диаграммы направленности антенны в горизонтальной плоскости |
градусы, минуты |
2º5' | |
|
Скорость вращения антенны |
об. /мин |
9 .11 | |
|
Мощность излучаемых сигналов: средняя |
кВт |
35 | |
|
Мощность излучаемых сигналов: импуьсная |
кВт |
0,45 | |
|
Длительность излучаемого сигнала |
мкс |
25 | |
|
Коэффициент подавления СДЦ |
дБ |
28 | |
|
Коэффициент подпомеховой видимости |
дБ |
18 | |
|
Неравномерность скоростоной характеристики СДЦ |
дБ |
10 | |
|
Точные измерения координат по выходу АПОИ: по азимуту |
градусы, минуты |
15' | |
|
Точные измерения координат по выходу АПОИ: по дальности |
метры |
250 | |
|
Вторичный канал | |||
|
Диапазон частот: запрос |
МГц |
1030 | |
|
Диапазон частот: прием |
МГц |
740,1090 | |
|
Дальность действия максимальная на высотах от 3000 м до 7500 м |
км |
120 .180 | |
|
Дальность действия максимальная на высотах |
км |
90 | |
|
Разрешающая способность: по дальности |
км |
1 | |
|
Разрешающая способность: по азимуту |
градусы, минуты |
15' | |
|
Точность определения координят по АПОИ: по дальности |
м |
250 | |
|
Точность определения координат по АПОИ: по азимуту |
градусы, минуты |
15' | |
|
Вероятность получения дополнительной информации |
0,98 | ||
|
Угол обзора в вертикальной плоскости |
градусы |
45º | |
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
- Исследование полупроводникового стабилитрона
- Проектирование системы автоматического слежения
- Разработка функциональной цифровой ячейки от функциональной логической схемы проектируемого узла до печатной платы узла
- Программирование микроконтроллеров
- Проектирование локальной вычислительной сети с применением структурированной кабельной системы
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем