Преобразование и расчет характеристик математических моделей объекта управления
Решетчатая функция это импульсная функция, состоящая из периодически следующих друг за другом δ – импульсов, площадь которых равна значениям непрерывного сигнала в те же моменты времени.
Графически преобразование непрерывного сигнала в импульсный сигнал с помощью решетчатой функции можно изобразить таки образом

Рис. 3.2. Формирование импульсного сигнала с помощью решетчатой функции.
На схеме рис. 3.2 АЦП заменен идеальным импульсным элементом (ИИЭ) и формирующим элементом (ФЭ). Идеальный импульсный элемент формирует на выходе δ – импульсы, площадь которых модулирована уровнем входного сигнала, т.е. идеальный импульсный элемент формирует на своем выходе решетчатую функцию от входного сигнала.
 , k=0, 1, 2,… (3.1)
, k=0, 1, 2,… (3.1)
Формирующий элемент является непрерывным с функцией веса равной выходному сигналу ФЭ. Это следует из определения функции веса, которая есть реакция элемента на δ – импульс. Именно такие импульсы и действуют на входе ФЭ. Зная функцию веса нетрудно вычислить и передаточную функцию ФЭ.
 . (3.2)
. (3.2)
Передаточная функция ФЭ вычисляется от одиночного импульса yd .
Введение понятия идеального импульсного элемента и решетчатой функции является математической абстракцией, позволяющей установить аналитическую связь между непрерывным и импульсным сигналом [83].
Вычислим передаточную функцию ФЭ – который генерирует на выходе прямоугольные импульсы с амплитудой А и длительностью tи.
 . (3.3)
. (3.3)
Если теперь в (3.3) положить ![]() , то мы получим передаточную функцию экстраполятора нулевого порядка, поскольку на интервале времени в отсутствии импульсов на выходе ФЭ на его выходе сигнал будет сохранять постоянное значение равное площади входного δ – импульса.
, то мы получим передаточную функцию экстраполятора нулевого порядка, поскольку на интервале времени в отсутствии импульсов на выходе ФЭ на его выходе сигнал будет сохранять постоянное значение равное площади входного δ – импульса.
Найдем теперь выражение для дискретной передаточной функции дискретного элемента, у которого входной и выходной сигналы соответственно равны
 (3.4)
(3.4)
Вычислим y(t) используя теорему о свертке или интеграл Дюамеля.
В дискретной форме этот интеграл заменится бесконечной суммой
 . (3.5)
. (3.5)
Если квантование входного и выходного сигналов осуществляется синхронно, то выходное время ![]() и (3.5) запишется так
и (3.5) запишется так
 . (3.6)
. (3.6)
Найдем теперь дискретное изображение по Лапласу от y(t). Для этого в преобразовании Лапласа также заменим интеграл суммой
 . (3.7)
. (3.7)
Подставим в (3.7) (3.6) получим
 . (3.8)
. (3.8)
Сделаем замену m=n-k и изменим очередность суммирования членов
![]() (3.9)
(3.9)
В (3.9) первая сумма есть ничто иное, как дискретное преобразование Лапласа от функции веса, или дискретная передаточная функция, второе слагаемое представляет собой дискретное преобразование Лапласа от входного сигнала. Следовательно, можно записать
![]() . (3.10)
. (3.10)
Откуда ![]() (3.11)
(3.11)
Дискретная передаточная функция есть отношение дискретных изображений по Лапласу выходной к входной величине при нулевых начальных условиях.
В теории дискретных систем более широко применяется z- преобразование, введенное в рассмотрение Джури. По сути дела z- преобразование есть модифицированное преобразование Лапласа, получаемое путем замены оператора
![]() . (3.12)
. (3.12)
Тогда дискретная передаточная функция по переменной z запишется в виде
![]() . (3.13)
. (3.13)
Дискретная передаточная функция по переменной z есть отношение z –преобразований выходной величины к входной при нулевых начальных условиях.
4. Дискретные модели пространства состояния
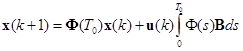
.В том случае если объект управления многомерный и имеет математическую модель, заданную в пространстве состояний, то последняя сводится к дискретной модели вида
![]() , (4.1)
, (4.1)
где параметры (матрицы) дискретной системы связаны с параметрами (матрицами) исходной непрерывной выражениями [78]
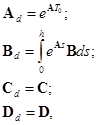 (4.2)
(4.2)
где Т0 – интервал квантования.
Докажем это утверждение. Известно [36, 65], что решение матричного дифференциального уравнения,
![]() , (4.3)
, (4.3)
заданного в пространстве состояний при начальных условиях x(0) описывается выражением
 , (4.4)
, (4.4)
Матрица Ф(t)
![]() , (4.5)
, (4.5)
которую определяют как переходную, определяется как ряд
![]() . (4.6)
. (4.6)
Дискретная форма записи решения (3.45) при условии, что входной сигнал остается постоянным во время такта квантования, запишется так
 . (4.7)
. (4.7)
Вводя новую переменную ![]() и подставляя ее в (4.7) получим
и подставляя ее в (4.7) получим
 . (4.8)
. (4.8)
Откуда с учетом (4.5) непосредственно следует (4.2)
Пример 4.1. Найдем дискретную модель в пространстве состояний исполнительного механизма, уравнения состояния которого имеют вид:
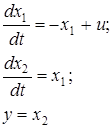 . (4.9)
. (4.9)
Для вычисления матричной экспоненты (4.5) найдем ее преобразование Лапласа, которое будет равно.
![]() (4.10)
(4.10)
I – единичная матрица.
После подстановки в него матрицы А получим
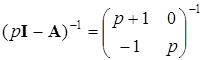 . (4.11)
. (4.11)
Вычислим обратную матрицу
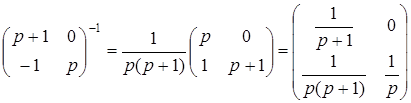 . (4.12)
. (4.12)
Откуда, осуществляя z – преобразование последней матрицы, найдем матрицу перехода дискретной системы Ad
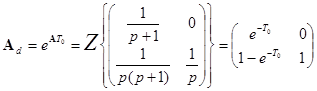 . (4.13)
. (4.13)
где Т0 – интервал дискретизации по времени.
Матрица Bd будет равна
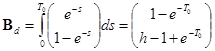 . (4.14)
. (4.14)
Тогда дискретный аналог модели исполнительного механизма будет выглядеть
Другие рефераты на тему «Экономико-математическое моделирование»:
Поиск рефератов
Последние рефераты раздела
- Выборочные исследования в эконометрике
- Временные характеристики и функция времени. Графическое представление частотных характеристик
- Автоматизированный априорный анализ статистической совокупности в среде MS Excel
- Биматричные игры. Поиск равновесных ситуаций
- Анализ рядов распределения
- Анализ состояния финансовых рынков на основе методов нелинейной динамики
- Безработица - основные определения и измерение. Потоки, запасы, утечки, инъекции в модели