Амплитудно-амплитудный радиолокатор
В режиме коррекции на выходе СВ действует сигнал ошибки. Этот сигнал после аналого-цифрового преобразователя АЦП подается на цифровой интегратор ЦИ, выполняющий Функцию устройства, запоминающего сигнал ошибки на время, равное периоду повторения зондирующих импульсов. Изменение коэффициента передачи ПУТ производится с помощью управляемого дискретного аттенюатора УДА. Использование цифровой техни
ки приводит к тому, что в общем случае не удается свести к нулю аппаратурную погрешность. Остаточная аппаратурная погрешность зависит от дискрета ![]() регулировки коэффициента передачи и увеличивается с ростом этого дискрета.
регулировки коэффициента передачи и увеличивается с ростом этого дискрета.
Операцию коррекции можно осуществить и с помощью аналоговой схемы. При этом сразу за схемой вычитания СВ включается коммутатор, который направляет сигнал ошибки с СВ либо на схему коррекции, либо на АЦП, который требуется для управления ДНА ФАР. Однако в таком устройстве коррекции требуется учет особенностей, свойственных аналоговым схемам.
При проектировании устройства коррекции необходимо обеспечить такое быстродействие элементов этого устройства, при котором время коррекции ![]() не превышает 0,1 от периода повторения зондирующих импульсов. Полученное в конце данного периода повторения значение
не превышает 0,1 от периода повторения зондирующих импульсов. Полученное в конце данного периода повторения значение ![]() корректирующего коэффициента
корректирующего коэффициента ![]() используется на следующем периоде повторения и сохраняется для этого в цифровом интеграторе ЦИ.
используется на следующем периоде повторения и сохраняется для этого в цифровом интеграторе ЦИ.
Кроме рассмотренного метода коррекции коэффициентов передачи ПУТ, при котором устанавливается такое значение ![]() , при котором обеспечивается заданное значение аппаратурной погрешности, возможно также воздействие на коэффициенты передачи
, при котором обеспечивается заданное значение аппаратурной погрешности, возможно также воздействие на коэффициенты передачи ![]() и
и ![]() . Однако при этом требуется энергии.
. Однако при этом требуется энергии.
Следует иметь в виду, что при любом методе коррекции обычно остается некоторая аппаратурная погрешность, вызываемая несовершенством либо используемого метода, либо устройства его реализующего. Это относится и к методам снижения аппаратурных погрешностей, например, к методу, основанному на объединении приемных трактов, рассмотренным в работе. Остаточное значение аппаратурной погрешности следует учитывать при оценке точности угломерного канала установка аттенюатора в высокочастотные цепи, что не целесообразно из-за возникающих потерь.
Расчет длины волны и параметров ФАР
При использовании в РЛ круглой ФАР с диаметром ![]() ширина ДНА в азимутальной плоскости
ширина ДНА в азимутальной плоскости ![]() и в угломестной плоскости
и в угломестной плоскости ![]() одна и та же, т.е.
одна и та же, т.е.
![]()
Значение ![]() определяется из заданной разрешающей способности РЛ по угловым координатам, которая составляет
определяется из заданной разрешающей способности РЛ по угловым координатам, которая составляет
![]()
Тогда
![]() град.
град.
Тогда длина волны зондирующего сигнала может быть найдена из соотношения
![]() м
м
Коэффициент усиления рассматриваемой ФАР при ![]() , выраженной в градусах, будет)
, выраженной в градусах, будет)
![]() ,
,
где принято, что КПД антенны ![]() .
.
Угол смещения ![]() максимумов ДНА, характеризующий отклонение максимумов диаграмм
максимумов ДНА, характеризующий отклонение максимумов диаграмм ![]() и
и ![]() от равносигнального направления, выбирается из компромиссных соображений. Рекомендуется принимать
от равносигнального направления, выбирается из компромиссных соображений. Рекомендуется принимать
![]() град .
град .
При таком значении ![]() диаграммы
диаграммы ![]() и
и ![]() пересекаются на уровне, близком к уровню половинной мощности.
пересекаются на уровне, близком к уровню половинной мощности.
Расчет параметров сигнала
В данном разделе рассчитываются длительность ![]() и период повторения
и период повторения ![]() зондирующих импульсов.
зондирующих импульсов.
Длительность импульса определяется из заданной разрешающей способности РЛ по дальности ![]() :
:
![]()
![]() =2*120/(3*10^8) = 0,8 мкс
=2*120/(3*10^8) = 0,8 мкс
Период повторения импульсов выбирается из условия однозначности дальнометрии:
![]() ,
,
которое с целью конкретизации расчета рекомендуется заменить равенством:
![]()
![]() = (2*1.1*30*10^3)/(3*10^8) = 220 мкс
= (2*1.1*30*10^3)/(3*10^8) = 220 мкс
где коэффициент запаса ![]() . Появляющийся при этом дополнительный интервал времени, равный
. Появляющийся при этом дополнительный интервал времени, равный
![]() ,
,
где ![]() - максимальная дальность цели, целесообразно использовать для коррекции неидентичностей приемных трактов, обеспечив соответствующее быстродействие устройства коррекции.
- максимальная дальность цели, целесообразно использовать для коррекции неидентичностей приемных трактов, обеспечив соответствующее быстродействие устройства коррекции.
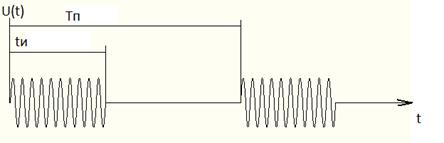 |
Рис.11
Выбор параметров устройств обработки сигналов
Основным устройством, подлежащим рассмотрению в данном разделе, является логарифмический усилитель промежуточной частоты ЛУПЧ.
Рекомендуется использовать ЛУПЧ в качестве квазиоптимального фильтра и выбирать его полосу пропускания из соотношения
![]()
![]() = 0,67/ 0,8*10^(-6) = 0,84 МГц
= 0,67/ 0,8*10^(-6) = 0,84 МГц
При такой полосе пропускания потери энергии сигнала из-за неоптимальности фильтра составляют 1,12 или примерно 0,5 дБ.
При разработке требований к элементам угломерного тракта следует учесть, что доплеровский сдвиг частоты отраженного сигнала компенсируется с помощью АПЧ, и указать возможные пределы изменения доплеровского сдвига ![]() отраженного сигнала, используя формулу:
отраженного сигнала, используя формулу:
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем