Амплитудно-амплитудный радиолокатор
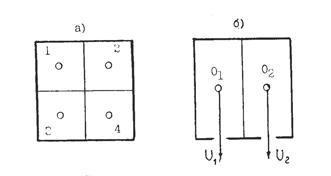
Рис. 8
Управление сканированием ДНА осуществляется с помощью сигнала УС-2 (см. рис. 7), поступающего с ЭВМ радиолокатора ЭВМ РЛ. Сканирование ДНА используется при поиске цели по угловым координатам. Сигнал УС-1 служит для переключения коммутаторов ИУК при коррекции неидентичностей приемно-усилительных трактов. Информация
о азимуте ![]() и угле места
и угле места ![]() цели поступает в ЭВМ РЛ.
цели поступает в ЭВМ РЛ.
Усиленный и отфильтрованный суммарный сигнал с ПУТ-![]() подается на обнаружитель движущихся целей ОДЦ и измеритель дальности ИД. Информация о скорости цели может сниматься с устройства селекции движущихся целей СДЦ при построении последнего на основе фильтрового метода. Обнаружитель Обн вырабатывает сигнал обнаружения СО. Этот сигнал, а также информация о дальности
подается на обнаружитель движущихся целей ОДЦ и измеритель дальности ИД. Информация о скорости цели может сниматься с устройства селекции движущихся целей СДЦ при построении последнего на основе фильтрового метода. Обнаружитель Обн вырабатывает сигнал обнаружения СО. Этот сигнал, а также информация о дальности ![]() и скорости
и скорости ![]() цели направляются (обычно в цифровой форме) в ЭВМ РЛ, которая вырабатывает команды для систем управления самолетом или его оружием, являющихся потребителями информации ПИ, выдаваемой ЭВМ РЛ. Эта ЭВМ используется и для управления радиолокатором, выдавая, например, команды на изменение параметров РЛ при переходе от ближней зоны обзора к дальней зоне.
цели направляются (обычно в цифровой форме) в ЭВМ РЛ, которая вырабатывает команды для систем управления самолетом или его оружием, являющихся потребителями информации ПИ, выдаваемой ЭВМ РЛ. Эта ЭВМ используется и для управления радиолокатором, выдавая, например, команды на изменение параметров РЛ при переходе от ближней зоны обзора к дальней зоне.
Структурная схема азимутального канала
Входящий в состав РЛ измеритель угловых координат должен определять азимут и угол места цели и содержит два идентичных по схеме канала: азимутальный и угломестный (УМК).
Структурная схема азимутального канала показана на рис. 9. Предусмотрено два режима работы этого канала: рабочий, когда измеряется угол ![]() , и калибровочный, когда корректируются неидентичности трактов обработки сигналов. Последний режим и соответствующая ему схема устройства коррекции УК (выделена на рис. 9) будут рассмотрены отдельно.
, и калибровочный, когда корректируются неидентичности трактов обработки сигналов. Последний режим и соответствующая ему схема устройства коррекции УК (выделена на рис. 9) будут рассмотрены отдельно.
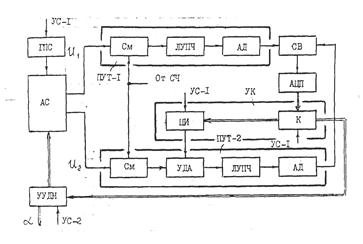
Рис. 9
В рабочем режиме коммутатор К соединяет выход углового дискриминатора с устройством управления диаграммой направленности УУДН. Кроме того, отключается генератор пилот-сигнала ГПС.
Угловой дискриминатор содержит два ПУТ и схему вычитания СВ. Сигнал СВ преобразуется в цифровую форму с помощью аналого-цифрового преобразователя АЦП. В каждый из ПУТ входят смеситель См, логарифмический усилитель промежуточной частоты ЛУПЧ и амплитудный детектор АД. В один из ПУТ включается управляемый дискретный аттенюатор УДА, служащий для изменения коэффициента усиления этого ПУТ. Нормировка сигналов, с помощью которой уменьшается влияние амплитудных флуктуаций входных сигналов на точность измерения угловых координат, осуществляется путем вычитания в СВ предварительно прологарифмированных в ЛУПЧ сигналов.
В амплитудно-амплитудном радиопеленгаторе информация о угле рассогласования ![]() содержится в амплитудах принимаемых по диаграммам
содержится в амплитудах принимаемых по диаграммам ![]() и
и ![]() сигналов, которые при идентичных диаграммах, т.е. при
сигналов, которые при идентичных диаграммах, т.е. при ![]() , и малых углах
, и малых углах ![]() имеют вид
имеют вид
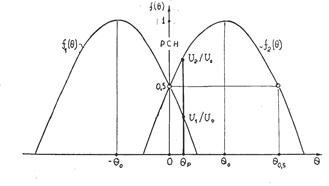 |
Рис.10
![]() ;
; ![]() .
.
Разложение функций ![]() в степенной ряд дает
в степенной ряд дает
![]() ;
; ![]() ,
,
где ![]() - нормированная крутизна ДНА на равносигнальном направлении (РСН).
- нормированная крутизна ДНА на равносигнальном направлении (РСН).
Сигналы, подаваемые на схему вычитания СВ, имеют следующие амплитуды:
![]() ;
;
![]() ,
,
где ![]() и
и ![]() - коэффициенты передачи ПУТ-1 и ПУТ-2 на линейном участке амплитудных характеристик ЛУПЧ;
- коэффициенты передачи ПУТ-1 и ПУТ-2 на линейном участке амплитудных характеристик ЛУПЧ; ![]() - амплитуда сигнала на входе ЛУПЧ, соответствующая началу логарифмического участка амплитудной характеристики;
- амплитуда сигнала на входе ЛУПЧ, соответствующая началу логарифмического участка амплитудной характеристики; ![]() и
и ![]() - коэффициенты передачи высокочастотных цепей (до смесителей);
- коэффициенты передачи высокочастотных цепей (до смесителей); ![]() - нормированное значение амплитуды входного сигнала.
- нормированное значение амплитуды входного сигнала.
Как следует из сказанного, в рассматриваемом амплитудно-амплитудном радиопеленгаторе информация о угле ![]() переносится из разности амплитуд входных сигналов в сигнал
переносится из разности амплитуд входных сигналов в сигнал ![]() , пропорциональный отношению этих амплитуд.
, пропорциональный отношению этих амплитуд.
На рис. 9 показан простейший вариант УК, основанный на управлении коэффициентом ![]() путем изменения коэффициента передачи
путем изменения коэффициента передачи ![]() одного из ПУТ при
одного из ПУТ при ![]() . Схема компенсации аналогична схеме автоматической регулировки усиления, чувствительным элементом которой является схема вычитания СВ угломерного канала.
. Схема компенсации аналогична схеме автоматической регулировки усиления, чувствительным элементом которой является схема вычитания СВ угломерного канала.
Коррекция выполняется в специально выделяемом интервале времени ![]() в конце периода повторения
в конце периода повторения ![]() , когда прием отраженных сигналов не ожидается, т.е. за пределами
, когда прием отраженных сигналов не ожидается, т.е. за пределами
![]() ,
,
где ![]() - максимальная дальность цели. Это обстоятельство необходимо учитывать при расчете периода повторения импульсов.
- максимальная дальность цели. Это обстоятельство необходимо учитывать при расчете периода повторения импульсов.
Момент включения устройства коррекции определяется управляющим сигналом УС-1, поступающим с ЭВМ РЛ (см. рис. 7 и рис. 9). По этому сигналу включается генератор пилот-сигнала ГПС и коммутатор К разрывает цепь обратной связи от СВ к УУДН. Пилот-сигнал несущей частоты через делители мощности подается на выходы модулей ФАР, заменяя сигналы этих модулей. При этом коррекции подвергаются все неидентичности от точки включения пилот-сигнала до выхода СВ. Возможно также использование специального излучателя пилот-сигнала, установленного перед ФАР на равносигнальном направлении.
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
- Проектирование системы охранной сигнализации
- Импульсный трансформатор
- Расчет резисторного усилителя тока с непосредственной связью
- Амплитудно-частотные характеристики и настройка связанных контуров
- Испытания РЭСИ на механические воздействия - обнаружение резонансных частот, вибропрочность и виброустойчивость
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем