Основы построения систем. Способы передачи и анализ телемеханических сигналов
Любая целенаправленная деятельность относительно каких-либо технологических объектов возможна в том случае, если существует система управления, содержащая необходимые функциональные узлы (рис. 1). Не имеет принципиальных отличий от указанной структуры и система диспетчерского управления движением поездов на участках железных дорог и станциях.

Рис. 1. Структурная схема системы управления
Выполнение целевых функций любой системы достигается, если между ее частями происходит обмен информацией, энергией и веществом. В зависимости от назначения системы и средств ее реализации три вида обмена одновременно могут не наблюдаться, однако информационные и энергетические взаимодействия для рассматриваемого класса устройств являются обязательными.
На железнодорожном транспорте получили широкое распространение следующие способы информационного и энергетического взаимодействия между территориально разобщенными частями системы управления технологическими объектами.
При местном способе информационные преобразования осуществляются только в пункте управления и в результате выработанных команд на объекты управления по индивидуальным линейным проводам подается вся энергия, необходимая исполнительным механизмам (рис. 2).

Рис.2. Структурная схема местного управления
Контроль состояния исполнительных механизмов выполняется по отдельным проводам и используется энергоресурс пункта управления. Такой способ взаимодействия с объектом является основным в системах электрической централизации с центральными зависимостями и центральным питанием.
Основные недостатки, ограничивающие область использования рассмотренного способа: небольшая дальность управления (единицы километров) и большой расход кабеля с различным поперечным сечением проводов (в зависимости от передаваемой мощности) для индивидуальных цепей.
Отмеченные недостатки менее ощутимы при использовании так называемого дистанционного способа управления объектами (рис.3).
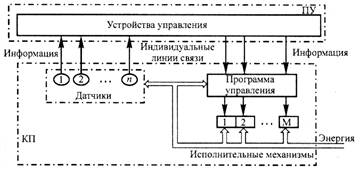
Рис. 3. Структурная схема дистанционного управления
При этом способе пункт управления (ПУ) взаимодействует с устройствами контролируемого пункта (КП) только на уровне информационного обмена по индивидуальным для каждого сообщения линейным проводам.
Исполнительные механизмы получают необходимую энергию от местного источника в соответствии с командами пункта управления. Сравнительно небольшие мощности передаваемых информационных сигналов позволяют существенно увеличить дальность управления и сократить расход кабеля на организацию взаимодействия в системе. Дистанционный способ получил широкое распространение в системах электрической централизации с местным питанием и в устройствах перегонной автоматики.
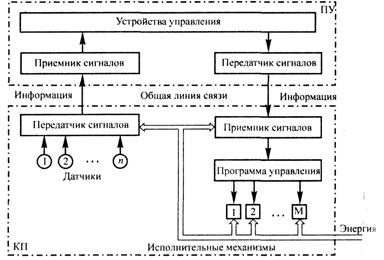 |
Рис. 4. Структурная схема телемеханического управления
Таким образом, основу телемеханики составляют устройства, позволяющие различными способами независимо передавать многие дискретные сообщения по общим линиям связи любой протяженности.
В зависимости от назначения передаваемой информации принято различать телемеханические системы телеуправления (ТУ), телесигнализации (ТС) и телеизмерения (ТИ) (рис. 5.)
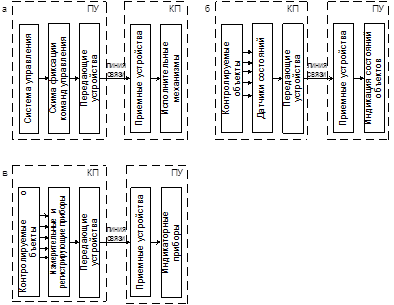
Рис.5. Структурные схемы систем телеуправления (а). телесигнализации (б) и телеизмерения (в)
Практически любая система телемеханики представляет собой определенную комбинацию перечисленных устройств. На железнодорожном транспорте для диспетчерского управления наибольшее распространение получили системы ТУ-ТС. В последнее время для диагностирования состояния устройств они стали дополняться и аппаратурой ТИ, т.е. приобретают структуру ТУ-ТС-ТИ.
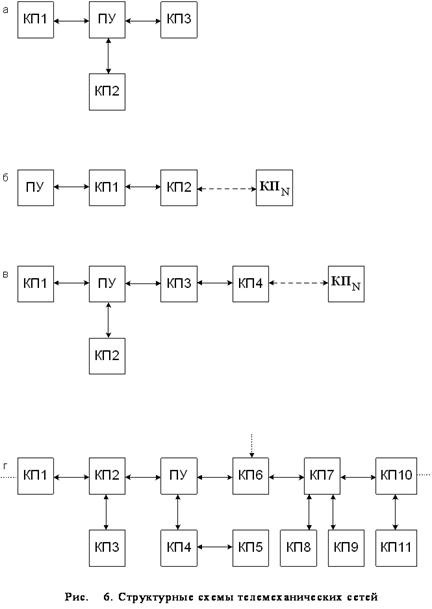
Территориально объекты системы телемеханики могут быть разно размещены относительно пункта управления. Поэтому телемеханическая сеть - совокупность устройств телемеханики и объединяющих их каналов связи - выполняется по радиальной (рис. 6,а), цепочечной (рис. 6, б) или радиально-цепочечной (рис. 6, в) структуре. На железнодорожном транспорте эти структуры наиболее распространены, хотя возможна реализация и более сложных древовидных структур (рис. 6, г).
Системы телемеханики любой структуры реализуются с использованием линий связи, в качестве которых может выступать та или иная физическая среда, способная передавать сигналы. В современных системах телемеханики чаще всего применяются проводные линии (выделенные или совмещенные с энергоснабжением), радиопункты и световодные линии.
По любой линии связи может быть организовано определенное число каналов для независимой передачи сообщений. При передаче сигналов телемеханики такой канал принято называть телемеханическим.
Телемеханические каналы являются средством объединения в систему источника и получателя сообщений.
Источники информации разнообразны, рассредоточены в пространстве, могут иметь детерминированное и неопределенное число состояний. Соответственно и организация устройств телемеханики различна для сосредоточенных и рассредоточенных объектов, для отражения их дискретного или непрерывного множества состояний. Любое изменение внутреннего состояния объектов контроля принято считать событием. О каждом событии контролирующий пункт должен получить сообщение. Сообщение, порожденное событием на передающем конце, должно быть, определенным образом доставлено получателю. Передача сообщений в системах телемеханики происходит по каналам связи, где в роли переносчика сообщений выступает переменный или постоянный ток. Поэтому переносчик с нанесенным на него сообщением уже представляет собой сигнал. Разумеется, что каждое сообщение образует свой собственный сигнал, отличный от других. Это необходимо для различения сообщений на приемном конце по виду сигналов.
Для упрощения процедур организации сигналов и выделения из них сообщений стремятся использовать ограниченное число признаков переносчика. Если число сообщений превышает число используемых признаков, каждому сообщению соответствует сложный сигнал, состоящий из определенной совокупности этих признаков, используемых на определенных интервалах времени.
Другие рефераты на тему «Транспорт»:
Поиск рефератов
Последние рефераты раздела
- Проект пассажирского вагонного депо с разработкой контрольного пункта автосцепки
- Проектирование автомобильных дорог
- Проектирование автотранспортного предприятия МАЗ
- Производственно-техническая база предприятий автомобильного транспорта
- Расчет подъемного механизма самосвала
- Системы автоблокировки
- Совершенствование организации движения и снижение аварийности общественного транспорта в городе Витебск