Основы построения систем. Способы передачи и анализ телемеханических сигналов
Интервал времени, в течение которого признак переносчика не меняется, называют импульсом сложного сигнала, а используемые характеристики переносчика — импульсными признаками.
Любой сложный сигнал на приемном конце может быть правильно понят, если будет выделен каждый импульс сигнала и произойдет запоминание его качества (т.е. импульсного признака) на время, достаточное для опр
еделения известных приемнику свойств всей совокупности импульсов сложного сигнала. Каждой такой совокупности импульсов сложного сигнала соответствует вполне определенное сообщение. Поэтому, если правильно принят сложный сигнал, правильно будет понято переданное сообщение. Процесс образования сложного сигнала, соответствующего определенному сообщению, называют кодированием, а обратные преобразования на приемном конце — декодированием.
Таким образом, в системах телемеханики всегда наблюдается определенная последовательность информационных преобразований, обусловленная необходимостью оптимального согласования отдельных частей системы. В любом случае на передающем конце каждое сообщение преобразуется в эквивалентный сигнал для согласования источника сообщений с каналом связи, а на приемном конце из сигнала выделяется соответствующее сообщение.
Сложность этих преобразований зависит от соотношения количества информации, от источника сообщений и пропускной возможности используемого канала, так как этим определяется выбор импульсных признаков и закона преобразования сигналов.
Первичные преобразователи, реагирующие на изменение физического параметра (механического, электрического, оптического, теплового, химического и т.п.) источника сообщений, принято называть датчиками, а все последующие — информационными преобразователями.
В любом преобразователе происходит отображение множества входных сигналов в эквивалентное множество выходных с изменением формы представления сигналов. Это позволяет любую систему телемеханики рассматривать как определенную последовательность информационных преобразователей, видоизменяющих сигналы. Например, сигналы х2 , с выходов датчиков (рис. 7) в кодирующем устройстве преобразуются в форму х3, удобную для согласования с возможностями канала, после чего модулятор преобразует кодированную запись сообщения х1, в линейный сигнал х4, т.е. выполняет модуляцию переносчика в соответствии с передаваемым сообщением. На приемном конце проводятся обратные преобразования сигналов для представления информации в наиболее удобной форме.

Рис. 7. Схема информационных преобразований в системах
Таким образом, для каждого преобразователя нужно уметь задавать взаимосвязь между входами и выходами в соответствующей математической форме, а также описывать сигнал любого вида.
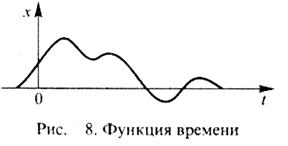
Чаще всего для описания сигналов используют функцию времени (рис.8), так как изменение физических параметров сигналов удобно наблюдать во времени. Если изменения наблюдаемых параметров происходят дискретно во времени, то и сигналы получают дискретную форму.
При непрерывном изменении параметров во времени сигналы могут быть аналоговыми или после дополнительных преобразований (квантование) — дискретными
Сигналы как функции времени у = х(t) графически удобно представлять совокупностью точек определенной кривой в двухмерном пространстве прямоугольных координат х и t (см. рис.8). Однако не во всех случаях такое представление сигналов оказывается достаточным и наглядным, в особенности для изучения свойств совокупности сложных сигналов. В этих случаях используют сложные пространства сигналов, в которых каждый сигнал изображается точкой в этом многомерном пространстве. Иными словами, все сигналы, обладающие свойствами Р, образуют множество сигналов S, т.е. S = {х; Р}. В другой форме эта же взаимосвязь может быть записана так: Р => х є S, т.е. Р верно для х, принадлежащего S.
Таким образом, определяя Р, задают нужное множество сигналов. Оперируя множествами, в теории сигналов широко используют операции объединения и пересечения.
Объединение множеств S1 и S 2 (рис. 10, а) представляется как:
![]()
а пересечение (рис. 10, б) как:
 |
![]()
Рис. 10. Пересекающиеся и непересекающиеся множества и подмножества
Операторы ![]() и
и ![]() используются также для разбиения множества на ряд непересекающихся подмножеств (рис. 10,в) т.е.
используются также для разбиения множества на ряд непересекающихся подмножеств (рис. 10,в) т.е. ![]()
![]() , если
, если![]() для,
для, ![]() где 0 - знак пустого множества.
где 0 - знак пустого множества.
Для получения более удобных узких подмножеств обычно используют разбиения с помощью отношения эквивалентности, выражаемого следующими свойствами: х ~ х для любого х (свойство рефлексивности); х ~ у => у ~ х (симметрия); х ~ у и у ~ z => х (транзитивность).
Более общий способ установления отношений между элементами множеств состоит в отображении элементов одного множества на элементы другого по определенному правилу, т.е. отображение - это правило, по которому элементам множества S1 (рис.11) ставятся в соответствие элементы множества S2. Символически это записывается как f : ![]() , что означает у = f (х),
, что означает у = f (х), ![]() , т.е. у - образ х в S 2 при отображении f.
, т.е. у - образ х в S 2 при отображении f.
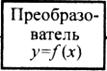
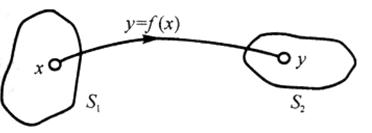
Рис. 11. Отображение сигналов
При взаимно однозначных отображениях используют и обратное отображение S2 на S1, т.е. ![]() , а также составные или последовательные отображения (рис. 12), т.е.
, а также составные или последовательные отображения (рис. 12), т.е. ![]()
Рис. 12. Составное отображение
Любое отношение эквивалентности может быть выражено как отображение, а любое отображение порождает отношение эквивалентности.
Наиболее широко применяемым в теории сигналов является отображение, называемое преобразованием Фурье:
 (1)
(1)
где:
Другие рефераты на тему «Транспорт»:
- Термостат в двигателе КамАЗа, карбюратор К-88А. Устройство автомобилей ВАЗ-2106 и ГАЗ-2417
- Качество морских перевозок грузов
- Гидравлические системы АКПП
- Разработка технологического процесса ремонта топливного насоса высокого давления автомобиля КамАЗ-5320 и приспособления для опрессовки плунжерных пар
- Конструкция, устройство и принцип работы аккумуляторной батареи
Поиск рефератов
Последние рефераты раздела
- Проект пассажирского вагонного депо с разработкой контрольного пункта автосцепки
- Проектирование автомобильных дорог
- Проектирование автотранспортного предприятия МАЗ
- Производственно-техническая база предприятий автомобильного транспорта
- Расчет подъемного механизма самосвала
- Системы автоблокировки
- Совершенствование организации движения и снижение аварийности общественного транспорта в городе Витебск