Датчики управления двигателем автомобиля
Рис. 22. Абсолютный линейный энкодер на основе интерферометрии Муара 1 — подвижная стеклянная пластина со строками линий с различными периодами C0–C6; 2 — лампа; 3 — линза; 4 — неподвижная пластина со строковыми прорезями; 5 — массив строковых фотодетекторов (для формирования четырех смещенных синусоидальных сигналов в строке).
В конструкции абсолютного энкодера каждая строка подвижной стек
лянной пластины характеризуется различным периодом линий, размещенных в соответствии со специальным алгоритмом. Каждой строке соответствует четыре фиксированных набора прорезей неподвижной платы, позволяющих получить в каждой строке 4 смещенных сигнала, отслеживаемых массивом фотодетекторов.
Метод интерферометрии Муара предоставляет возможность реализовать измерение абсолютного положения с шагами порядка 0,1 мкм в пределах длины до 3 м.
Методы линейной интерферометрии могут быть преобразованы также для детектирования углового положения.
Оптические энкодеры в автоэлектронике
Угловые оптические энкодеры могут быть эффективно использованы в автоэлектронике как датчики цифровых систем обратной связи с двигателем или как цифровые элементы контроля скорости, положения, крутящего момента.
Ограничения при использовании оптических технологий в автоэлектронике требуют минимизации факторов воздействия загрязнений. Для автомобильных условий будут приемлемы уплотненные исполнения устройства, в корпусе которого размещается и измерительная головка, и оптический диск или линейка.
Для компенсации производственных допусков оптические энкодеры часто нуждаются в подстройке потенциометром. Если абсолютные энкодеры выполняются на основе пикселей, то для компенсации старения светодиода может потребоваться периодическая калибровка.
Другие недостатки оптоэлектронных устройств — рабочий температурный диапазон и подверженность оптических дисков и волоконно-оптических соединений сильным ударным воздействиям. Поскольку в автоэлектронике большинство датчиков положения работает в условиях повышенных температур, вибраций или ударов, оптоэлектроника более подходит для систем с менее жестким режимом, например, положения педали акселератора или тормоза, рулевого управления или линейных систем — детектирования положения сиденья или подвески. Оптические энкодеры находят применение как цифровые элементы управления приборной панели: для систем климат-контроля, контроля зеркал, аудиоконтроля, контроля солнечного люка.
Некоторые примеры разработок оптических датчиков для автоэлектроники содержатся в описаниях патентов.
Магнитостриктивные преобразователи – актуальные измерители линейных и нелинейных перемещений и детекторы крутящего момента
В последние годы интерес многих автомобильных производителей и инженеров-разработчиков вызывают магнитостриктивные датчики, применение которых в автоэлектронике и промышленности обычно связано с предоставляемой ими возможностью детектирования значительных линейных перемещений. Линейные датчики обычно отличаются значительной длиной (потенциометры, LVDT, энкодеры). За исключением потенциометров, реализация многих линейных систем связана также с важнейшим конструктивным ограничением, которым является значительная длина цели и, следовательно, цена. Уменьшение длины цели накладывает сопутствующие функциональные ограничения, такие как компромисс измерительного диапазона и разрешения (датчики Холла и некоторые другие известные концепции индуктивных, емкостных, оптических преобразователей и т.д).
Теория магнитостриктивных датчиков
Магнитострикция — это свойство некоторых кристаллических, обычно ферромагнитных материалов, таких как железо, никель и кобальт, изменять размер и (или) форму при взаимодействии с внешним магнитным полем. Явление изменения размера и формы материала в магнитном поле представляет собой магнитостриктивный эффект.
Явление магнитострикции было открыто Дж. Джоулем в 1842 году. Наибольших значений магнитострикция достигает в ферро и ферримагнетиках (Fe, Ni, Со, Gd, Tb и других, а также ряде сплавов и ферритах). Эта характеристика материала не изменяется со временем.
Считается, что материал характеризуется положительной магнитострикцией, если он расширяется при помещении в магнитное поле, и отрицательной магнитострикцией, если размеры материала уменьшаются. Средняя величина магнитострикции в основных металлах и простых магнитострикционных сплавах небольшая — порядка 1 мкм/м.
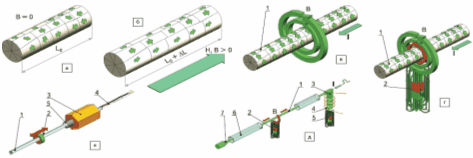
Рис. 23. Иллюстрация теории и принципа действия магнитостриктивных преобразователей: а, б — иллюстрация магнитостриктивного эффекта в ферромагнитном стержне под действием внешнего магнитного поля B: а — хаотичное распределение магнитных моментов доменов в отсутствие поля; б — упорядочение магнитных моментов доменов при намагничивании внешним полем; L0 — начальная длина стержня при B = 0; ΔL— удлинение при намагничивании; в, г— иллюстрация магнитостриктивного эффекта в ферромагнитном проводнике с током I; в— распределение магнитных моментов доменов под действием магнитного поля тока B; г— скручивание магнитных моментов доменов под действием аксиального магнитного поля: 1— доменный стержень; 2— аксиальный постоянный магнит; д— измерительный принцип магнитостриктивных датчиков MTS: 1— волновод; 2— постоянный магнит-цель; 3— измерительная лента; 4— сенсорная обмотка; 5— постоянный магнит, смещающий обмотку; 6— изоляционная трубка; 7— демпфер; I— импульсный ток; B— скручивающий импульс (направление распространения импульса показано стрелками); е— типичный магнитостриктивный датчик абсолютного линейного положения: 1— сенсорный стержень (волновод в защитной трубке); 2— постоянный магнит-цель; 3— электронный блок — магнитостриктивный датчик и интегрированная электроника обработки сигнала в корпусе; 4— терминалы преобразователя; 5— элемент крепления устройства
Для того чтобы объяснить явление магнитострикции, ферромагнитный материал рассматривается как физическая совокупность доменов — областей из многих атомов — малых постоянных магнитов, характеризующихся магнитными моментами. В отсутствие магнитного поля магнитные моменты доменов в пространстве располагаются хаотично. При намагничивании материала домены выстраиваются вдоль своих легких осей намагниченности так, что магнитные моменты стремятся к параллельности друг другу и внешнему магнитному полю (рис. 23а, б).
На рис. 23б показано, что напряженность магнитного поля H при B>0 вызывает изменение размеров тела (длины стержня L0) вследствие выравнивания магнитных моментов доменов.
Таким образом, магнитостриктивные материалы преобразуют магнитную энергию в механическую, и наоборот. Намагничивание вызывает механическое напряжение магнитостриктивного материала, которое и приводит к изменению длины.
Поскольку приложение магнитного поля вызывает механическое напряжение, которое изменяет физические свойства магнитостриктивного материала, существует и обратный магнитостриктивный эффект, называемый эффектом Виллари: приложение внешней силы, образующей напряжение в магнитостриктивном материале (растяжение, кручение, изгиб и т. д.), изменяет магнитные свойства (магнитную проницаемость) материала.
Другие рефераты на тему «Транспорт»:
Поиск рефератов
Последние рефераты раздела
- Проект пассажирского вагонного депо с разработкой контрольного пункта автосцепки
- Проектирование автомобильных дорог
- Проектирование автотранспортного предприятия МАЗ
- Производственно-техническая база предприятий автомобильного транспорта
- Расчет подъемного механизма самосвала
- Системы автоблокировки
- Совершенствование организации движения и снижение аварийности общественного транспорта в городе Витебск