Датчики управления двигателем автомобиля
Датчики рефлективного типа в большей степени подвержены воздействию механической нестабильности системы. К примеру, при вибрации, если остановка ротора соответствует краю отражающей полосы в рабочей области датчика, рефлективный датчик непрерывно генерирует прерывания. В аналогичной ситуации с щелевым датчиком получение неоднозначного выхода при частичном затемнении фототранзистора позволяет из
бежать гистерезис в схеме компаратора, но рефлективный датчик потребует дополнительных аппаратных и программных средств. Для обнаружения необычных условий программа может иметь таймер, отслеживающий время между прерываниями, при несогласовании которого подпрограмма обслуживания прерываний может их игнорировать.
Для правильности и безопасности системы необходима и гарантия того, что сбойные датчики будут локализованы. Так, сбойный или отсоединенный светодиод позволяет фототранзистору предоставлять системе информацию об остановке двигателя, закрытом капоте или двери. Ту же самую информацию может предоставлять засоренный фототранзистор.
Первый способ решения проблемы — применение двух датчиков с инверсными выходами. Один из них блокируется при открытом капоте, второй — при закрытом. Одновременно анализируется состояние двух датчиков, которые для верификации состояния или функциональности системы должны оба находиться в правильном состоянии.
Метод обнаружения отсоединенного светодиода — определение напряжения на аноде светодиода. Когда светодиод включен, падение напряжения, определяемое компаратором, составит около 1,2 В (типично), и выход компаратора будет высоким. Если светодиод открывается, напряжение на аноде возрастет до Ucc (более 3 В).
Для детектирования сбойных условий закорачивания можно добавить второй компаратор. Опорное напряжение в этом случае выбирается порядка 0,6 В, программное обеспечение объявляет ошибку, если напряжение падает ниже опорного.
Оптические энкодеры
Угловые оптические энкодеры
Принципы работы угловых энкодеров проиллюстрированы рис. 18, 19.
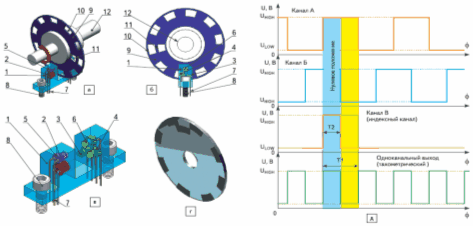
Рис. 18. Инкрементальный энкодер — датчик относительного положения, скорости и направления а–б — угловой инкрементальный энкодер; в — конструкция измерительной головки: 1 — корпус датчика; 2 — светодиод — источник света для инкрементальных каналов А и Б; 3, 4 — ординарные фотодетекторы (фототранзисторы или фотодиоды); 5 — светодиод — источник света для индексного канала; 6 — фотодетектор индексной метки; 7 — терминалы для монтажа на печатной плате; 8 — элементы для монтажа корпуса; 9 — 4-битный (24 = 16 положений) перфорированный ротор с прорезями; 10 — прорези для инкрементальных каналов; 11 — прорезь — индексная метка; 12 — вращающийся вал; г — вариант исполнения 4-битного инкрементального ротора из стекла; д–е — варианты сигналов инкрементального энкодера: д — цифровой инкрементальный энкодер (инкрементальные каналы А и Б, индексный выход В фототранзисторов, канал скорости);
Угловой оптический энкодер состоит из тонкого оптического диска и стационарного блока — измерительной головки, включающей источник света и фотодетектор. Измерительная головка может быть построена как по принципу прерывателя, так и рефлектора, но прерыватель проще реализуется и используется чаще.
Оптический диск прерываемого энкодера включает кодированную последовательность прозрачных и непрозрачных участков. Маркеры могут представлять собой, например, отверстия в металлическом листе или метки на стеклянном диске. При вращении диска, в зависимости от его типа, маркеры пропускают или перекрывают луч света, направленный от светового источника к фотоприемнику (фотодиоду или фототранзистору).
Фотодетектор генерирует сигнал частотой, равной частоте следования кодовых элементов, в цифровой форме (фототранзистор) или аналоговый импульсный сигнал, который также может быть усилен и оцифрован. При подключении внешнего счетчика прямоугольных импульсов оптический метод позволяет измерять угловую скорость вращения диска. Посредством нанесения специальной индексной отметки, индицирующей начальное положение диска, уже можно измерять относительное угловое положение вала в диапазоне 360° (рис. 18). Этот тип датчиков представляет собой так называемые инкрементальные энкодеры — самые простые и наименее дорогие оптические устройства.
При добавлении второй пары «светодиод-фототранзистор» с угловым смещением относительно первой, соответствующим четверти периода сигнала, может быть получена вторая последовательность импульсов — канал Б с фазовым смещением относительно канала А на 90° (рис. 19д–ж). Инкрементальный энкодер, который использует три оптических датчика (один для детектирования положения фазы 0° — канал В, два других — для формирования инкрементальных каналов с фазовым смещением сигналов в 90°), позволяет одновременно удваивать разрешение при измерении положения и скорости и детектировать направление.
Разрешение инкрементальных энкодеров измеряется в импульсах за оборот (pulses per revolution, ppr). В дальнейшем разрешение может быть увеличено посредством нанесения большего числа линий на оптический диск и добавления пар «светодиод–фотодетектор» в измерительной головке. Максимальное число счетов за вращение представляет собой функцию диаметра энкодерного диска и характеристик светопередачи, определяющих допустимый размер кодовых элементов.
Существуют различные способы нанесения маркеров на оптический диск. В ранних системах чаще использовались металлические диски с перфорацией (рис. 18а–б), но максимальная площадь отверстий для повышения разрешающей способности и точности датчика ограничена — должно оставаться некоторое количество материала, обеспечивающее форму и прочность диска. Современные диски изготавливаются из стекла, маркеры на котором вытравливаются (рис. 18г, рис. 19г). Этот метод позволяет получить типично 100–6000 сегментов, что соответствует разрешению в 3,6–0,06°.
Одним из главных недостатков инкрементального энкодера является то, что последовательность импульсов запасается во внешнем буфере или счетчике. При сбое в подаче питания счет будет потерян. Кроме того, если машина с инкрементальным энкодером предполагает отключение на ночь, то на следующий день энкодер не сможет предоставить информацию о точном положении вала, пока не будет активирован внешний переключатель (home-detection switch) или программа подключения, вращающая вал до прохождения индексной отметки, которая затем каждый раз обнуляет буфер счетчика, начиная отсчет относительного положения.
Решение данной проблемы предоставляют абсолютные энкодеры (рис. 19), которые используют более точный метод определения положения, основанный на кодировании абсолютного положения посредством множественных групп сегментов, размещенных на диске по линиям концентрических окружностей.
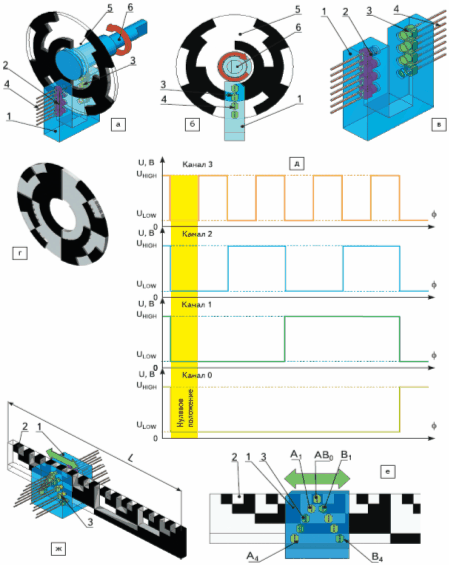
Рис. 19. Абсолютный энкодер — датчик абсолютного положения и скорости а–б — 4-битный угловой абсолютный энкодер; в — конструкция измерительной головки: 1 — корпус датчика; 2 — массив светодиодов; 3 — массив фотодетекторов (фототранзисторов или фотодиодов); 4 — терминалы измерительной головки; 5 — 4-битный ротор с кодом Грэя; 6 — вращающийся вал; г — вариант исполнения 4-битного абсолютного ротора с двоичным кодом из стекла; д — выходной цифровой код двоичного абсолютного энкодера; е, ж — линейный 4-битный абсолютный энкодер с двоичным кодированием и оцениванием посредством V-выборки; 1 — корпус измерительной головки; 2 — измерительная линейка; 3 — массив фотодетекторов V-выборки; е — оценивание посредством V-выборки: AB0, A1…A4, B1…B4 — фотодетекторы в составе двух линеек V-выборки (выбираемые для оценивания подсвечены желтым); ж — иллюстрация линейного абсолютного энкодера.
Другие рефераты на тему «Транспорт»:
Поиск рефератов
Последние рефераты раздела
- Проект пассажирского вагонного депо с разработкой контрольного пункта автосцепки
- Проектирование автомобильных дорог
- Проектирование автотранспортного предприятия МАЗ
- Производственно-техническая база предприятий автомобильного транспорта
- Расчет подъемного механизма самосвала
- Системы автоблокировки
- Совершенствование организации движения и снижение аварийности общественного транспорта в городе Витебск