Ультразвуковые сканеры
Рисунок 8. Передача движения на пьезопреобразователь.
Дисковый пьезопреобразователь находится в оправке, которая закреплена на оси шестеренки. Для подвода импульса возбуждения и съема эхо-сигнала используются гибкие проводники, которые навиваются на ось. Это исключает их болтание во время качания ПЭП и продлевает срок службы. Электродвигатель и датчик углового положения конструктивно объеди
няются в моноблок, размещаемый в цилиндрическом корпусе из легкого металла.
Сложность системы управления датчиком с колебательным двигателем и переходные процессы, возникающие при его реверсе, побуждают разработчиков вновь обратиться к датчикам с непрерывно вращающимся двигателем. Они применялись и раньше в УЗ сканерах аналогового типа. В качестве ДУП в них использовались синусно-косинусные трансформаторы (СКТ), которые подобно трансформаторному ДУП, рассмотренному выше, имеют три обмотки. Одна из них – обмотка возбуждения, питаемая ВЧ током, а две другие – синусная и косинусная – дают сигналы, пропорциональные синусу и косинусу угла поворота ротора. В качестве датчиков угла СКТ оказались неудобными для современных цифровых УЗ аппаратов.
В датчиках с непрерывным вращением используются стандартные двигатели постоянного тока. Так как обычно они высокоскоростные, приходится понижать частоту вращения с помощью редукторов примерно с 3000 об/мин до 300 об/мин. Кроме того, нужен специальный механизм для преобразования вращательного движения в колебательное. В таком датчике перспективно применение ДУП с оптоэлектронными преобразователями. Принцип этих датчиков хорошо известен. Они применяются, например, в «мыши» компьютера для управления положением курсора. Один из возможных вариантов кинематической схемы датчика с односторонне вращающимся двигателем и ДУП оптронного типа приведен на рис.9.
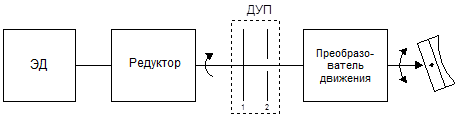 |
Частота вращения электродвигателя понижается редуктором. Вращение его выходного вала преобразователем движения переводится в качательное движение ПЭП. Оптоэлектронный датчик углового положения состоит из двух дисков 1 и 2, причем диск 1 сидит на общем валу редуктора и преобразователя движения и, следовательно, вращается, а диск 2 неподвижен. Вал проходит через отверстие в его середине.
Более подробно устройство оптоэлектронного ДУП поясняет рис.10. Измерение углов производится с помощью ИК оптотоэлектронных пар ОП1, ОП2 и ОП3. Излучение источников проходит через щели и отверстия, расположенные на дисках. На диске 1 по периметру размещены щели (их может быть 128 – 256) и имеется одно отверстие. На диске 2 имеется две группы щелей по 8 –12 в каждой, разнесенные на угол около 90о. Для ИК излучения отверстие и щели диска 2 играют роль коллиматоров. Шаг щелей одной группы такой же, как и на диске 1, а шаг другой группы несколько иной. Одна из групп щелей (с меньшим шагом) выполняет роль нониуса и служит для более точного измерения углов. Метод нониуса широко используется в
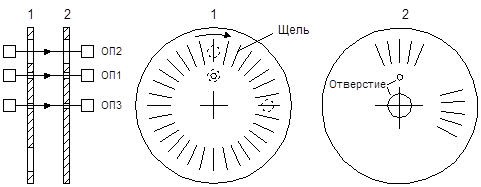 |
измерительной технике. Нониусы имеются на штангенциркулях, микрометрах, лимбах металлорежущих станков. Применяется этот метод и в электронных измерительных приборах.
При сборке датчика ПЭП устанавливается в определенное начальное положение. Когда в процессе вращения происходит совпадение отверстий, ИК луч от источника оптопары ОП1 попадает на ее приемник. Возникающий в нем импульс свидетельствует о начале движения в секторе качания. Одновременно с этим импульсом начинают поступать импульсы от оптопар ОП2 и ОП3. Первые из них (по ходу вращения) совпадают во времени, затем они начинают расходиться и в некоторый момент снова происходит совпадение. По числу импульсов между первым и вторым совпадением и уточняют величину измеряемого угла. С помощью нониуса измерения штангенциркулем можно производить с точностью до 0,1 мм и даже 0,05 мм. В данном случае измерение угла можно производить с точностью, по крайней мере, до половины шага.
Управление датчиком с непрерывно вращающимся двигателем намного проще, чем датчиком с качающимся двигателем. Кроме стабилизатора скорости вращения для двигателя практически ничего не требуется. Основная сложность при производстве датчика заключается в изготовлении дисков со щелями и их юстировке (установке нужного взаимного расположения). Определенные трудности возникают и при проектировании преобразователя вида движения – вращения в качание. Он должен быть компактным, долговечным, вносить небольшие дополнительные
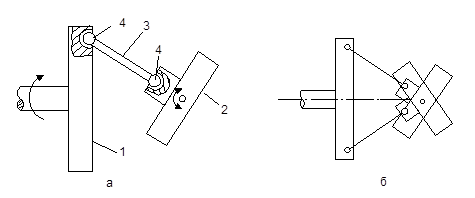 |
вибрации. Так как преобразователь в основном располагается в камере с иммерсионной жидкостью, то он должен иметь обтекаемую форму, чтобы испытывать наименьшее сопротивление и не создавать завихрений в жидкости при своем движении. Простейшая конструкция преобразователя движения предлагается на рис.11.
Передача движения от вала редуктора на пьезопреобразователь 1 осуществляется с помощью диска 2 (водило) через шатун 3 и шарниры 4 (рис 11,а). Так как ПЭП закреплен на оси, то он совершает качательное движение. Шатун при этом вращается по конической поверхности и все время проворачивается в шарнирах (рис. 11, б). Эта конструкция, конечно, не отвечает поставленным выше требованиям. На самом деле она значительно сложнее. Основной недостаток датчиков с качающимся ПЭП – неприятные ощущения вибрации, которые испытывает врач. Они накапливаются в течение длительного времени и иногда приводят к развитию синдрома вибраций. Поэтому в некоторых странах такие датчики даже запрещены. Тем не менее, секторные механические датчики в ряде случаев практически незаменимы (внутриполостные применения).
Для точечных исследований применяют метод пункций. Обычно для этого используют линейные или конвексные датчики с насадкой в виде иглы, по которой передаются УЗ колебания.
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем