Ультразвуковые сканеры
3. Конструкции и технологии датчиков
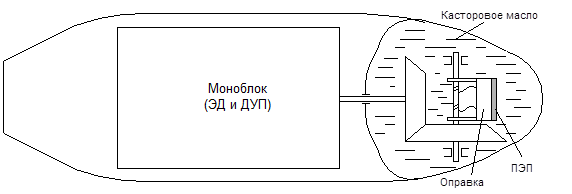
Первыми датчиками для универсальных УЗ сканеров были секторные механические датчики качающегося типа (термин «качающийся» относится к пьезоэлектрическому преобразователю). Сейчас они постепенно вытесняются электронно-управляемыми датчиками (линейными и конвексными), но по-прежнему применяются и совершенствуются.
Обобщенная структурная схема та
кого датчика приведена на рис.4.
 | ||||||
 | ||||||
 |  | |||||
Рисунок 4. Структурная схема механического датчика.
Электродвигатель может совершать возвратно-вращательное движение и одностороннее вращение. В зависимости от этого датчик углового положения может иметь различный принцип действия и конструкцию. Преобразователь движения может включать редуктор и преобразователь вида движения (перевод вращения из одной плоскости в другую, перевод вращательного движения в качательное).
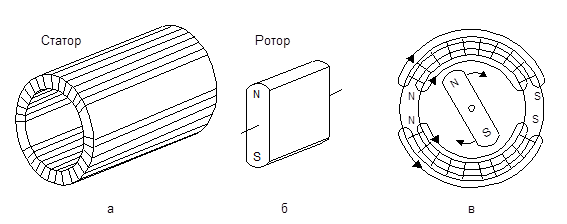 |
Рисунок 5 Моментный двигатель постоянного тока.
Основными частями электродвигателя являются статор и ротор (рис. 5, а, б) Статор собирается из тонких пермаллоевых колец. Обмотка статора состоит из двух секций, которые включаются встречно. Ротор представляет собой постоянный магнит из феррита. При пропускании тока через обмотки статора они создают в сердечнике магнитные потоки, направленные в разные стороны, поэтому основной поток в сердечнике равен нулю. Но ввиду того, что ширина колец мала по сравнению с их диаметром, образуются потоки рассеяния, сцепленные с обмотками. Получаются как бы два магнита с одинаково расположенными одноименными полюсами. Взаимодействуя с полями этих магнитов, ротор поворачивается, стремясь занять положение, параллельное обмоткам. Динамические характеристики механической системы и параметры тока возбуждения (величина, форма, период) согласованы так, что когда ротор повернется на угол 90 – 100о от исходного крайнего положения, происходит коммутация тока в обмотках и начинается его движение в обратную сторону.
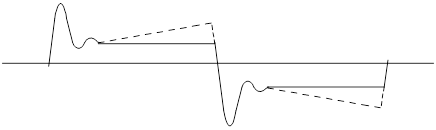
Чтобы движение было равномерным, необходимо постоянство вращающего момента, а для этого в свою очередь требуется постоянство тока в обмотках. В момент коммутации и смены направления вращения возникают броски тока за счет инерционности системы управления (рис 6). В некоторых случаях ток может линейно нарастать (штриховая линия на рисунке). Требуемую форму тока обеспечивает специальная система регулирования с обратной связью через датчик угла поворота. Она учитывает механические и электрические характеристики системы. В режиме М должен быть задан определенный угол поворота пьезопреобразователя. Для этого система регулирования с высокой частотой реверсирует ток в обмотках статора, удерживая тем самым ротор в одном положении.
 |
Броски тока двигателя весьма нежелательны, особенно при пуске датчика. Пусковые токи могут достигать величин, опасных (несколько ампер) для выходного усилителя системы управления, питающего двигатель. При сбое системы управления могут одновременно включиться все механические датчики используемого комплекта (как правило, все они подключены и выбираются с помощью сенсоров). Это может привести к выходу усилителя из строя. На этот случай предусмотрена защита, например, в виде плавкого предохранителя.
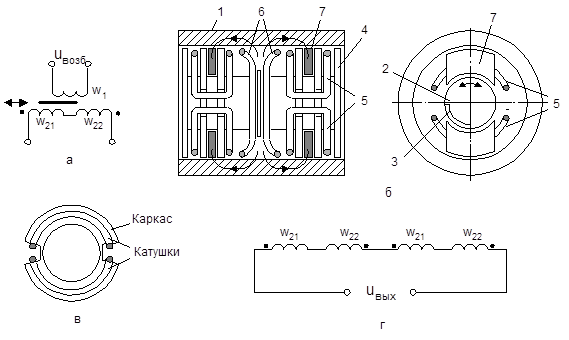 |
Рисунок 7. Датчик углового положения трансформаторного типа.
которые включены встречно. Подвижный сердечник перемещается относительно этих обмоток, при этом ЭДС в них изменяются. В среднем положении сердечника они одинаковы, и выходной сигнал равен нулю. При смещении сердечника влево или вправо ода из ЭДС увеличивается, а другая уменьшается. Выходной сигнал растет по величине и может иметь различную фазу в зависимости от положения сердечника (левое или правое). Так как габариты датчика очень маленькие, первичная обмотка возбуждается высокочастотным током (10 – 15 кГц).
На рис 7, б изображена упрощенная конструкция ДУП. Его основными частями являются статор 1 из мягкой стали, ротор 2 из немагнитной стали (например, 36НХТЮ) с помещенной на нем пластинкой 3 из ферромагнетика, каркас 4 с размещенными на нем парами сигнальных катушек 5 и катушкой возбуждения 6. Сигнальные катушки расположены парами симметрично относительно центра и имеют сложную форму. Для лучшего представления о ней на рис 14, в показан фрагмент каркаса и одна пара катушек. Пары соединяются последовательно, так, чтобы одноименные катушки были включены согласно (рис.7, г). Катушка возбуждения находится между парами сигнальных катушек. При монтаже края ее витков разводят («распушают»). Внутри сигнальных катушек закрепляют ферритовые сердечники 7.
За счет «распушивания» катушки возбуждения значительная часть создаваемого ею магнитного потока ответвляется в статор и попадает в сердечники 7. Перемещение ферромагнитной пластинки 3 вызывает перераспределение магнитных сопротивлений между сердечниками 7 и катушками сигнальных пар, изменение их ЭДС и возникновение сигнала на выходе. Датчик проектируют, а затем регулируют таким образом, чтобы зависимость величины сигнала от угла поворота была линейной.
 |
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем