Теоретические основы построения модуляторов и демодуляторов
Рис. 4. Частотный демодулятор
Полосовой фильтр (рис. 5) формирует второй сигнал S2(t), управляющий БМ. При высокой добротности фильтра фазовый сдвиг ![]() , вызываемый девиацией частоты
, вызываемый девиацией частоты ![]() вблизи несущей
вблизи несущей ![]() ,
,
может быть записан в следующем виде
 ,
,
|
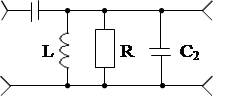 |
Рис. 5. Фазосдвигающий фильтр
Отфильтрованный ФНЧ сигнал оказывается пропорциональным девиации частоты входного сигнала
 ,
,
где К – коэффициент преобразования частотного демодулятора; UЧМ – входное напряжение ЧМ сигнала.
Реализация ПС в виде амплитудного модулятора на основе операционных усилителей и изменении проводимости полевого транзистора показана на рис.6. Здесь в качестве управляемого параметра используется проводимость канала ПТ, характеристика которой в режиме управляемого сопротивления аппроксимируется выражением
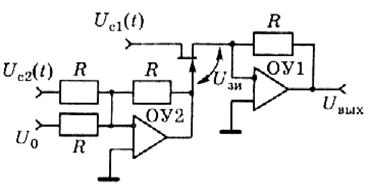 |
Рис. 6. Амплитудный модулятор на основе ПТ и ОУ
Пусть на один вход (в цепь стока ПТ) подается относительно высокочастотный (несущий) сигнал UC1(t), а на второй вход (в цепь затвора ПТ) посредством инвертирующего сумматора на ОУ2 с единичным коэффициентом передачи – низкочастотный (модулирующий) UC2(t) и постоянная составляющая напряжения U0
![]() ; (8)
; (8)
![]() ; (9)
; (9)
![]() , (10)
, (10)
где Um1, Um2 и ![]() ,
, ![]() - амплитуды и частоты соответственно несущего и модулирующего сигналов.
- амплитуды и частоты соответственно несущего и модулирующего сигналов.
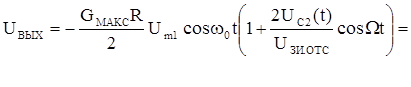
Принимая во внимание (7)…(10) и учитывая, что между затвором и истоком ПТ действует напряжение ![]() , для выходного напряжения амплитудного модулятора в соответствии с формулой
, для выходного напряжения амплитудного модулятора в соответствии с формулой ![]() можно записать
можно записать
 (11)
(11)
или
 (12)
(12)
![]() ,
,
где Um0 и m – амплитуда несущей и глубина модуляции получаемого АМ колебания;
![]() , (13)
, (13)
 . (14)
. (14)
Для исследования спектрального состава АМ колебаний формулу (12) целесообразно заменить выражением (4), содержащим всего лищь три составляющих. Реально спектр (рис. 7) АМ сигнала модулятора помимо трех основных частот (4) содержит ряд других составляющих, отстоящих от несущей на величину, кратную частоте ![]() модулирующего сигнала, что связано в основном с нелинейностью характеристики (7) ПТ.
модулирующего сигнала, что связано в основном с нелинейностью характеристики (7) ПТ.
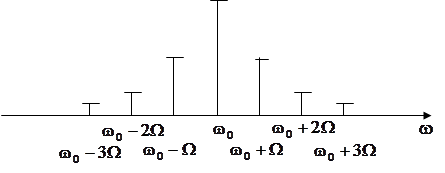 |
Рис. 7. Спектр выходного сигнала амплитудного модулятора
2. Микроэлектронные формирователи и преобразователи
измерительных сигналов
2.1 Формирование синусоидальных высокочастотных сигналов с
повышенной стабильностью амплитуды и линейностью характеристики управления по частоте
Наиболее распространенным методом формирования синусоидальных сигналов на повышенных частотах является метод, основанный на компенсации активных потерь в резонансном LC-контуре отрицательным сопротивлением, реализуемым с помощью, например, линейных усилителей с ПОС, КОС, электронных приборов с падающей вольтамперной характеристикой и т.д. На относительно низких частотах предпочтение отдается RC-генераторам, например, на основе моста Вина, так как на этих частотах для LC-генераторов требуются большие номиналы индуктивностей и емкостей, что для МЭУ нежелательно.
Получаемые таким или другим способом колебания оказываются недостаточно стабильными по амплитуде и по частоте, в особенности при их управлении. При этом характеристики управления, как правило, являются нелинейными, что определяет целесообразность их линеаризации и стабилизации.
Основополагающим методом решения данной проблемы является разработанный нами метод линеаризации и термостабилизации характеристик нелинейных элементов [4,7], изложенный в работах [1,2].
Применительно к управлению формируемых колебаний данный метод отличается лишь реализацией образцового преобразователя “параметр - напряжение”, который в данном случае должен быть преобразователем частоты в напряжение (ПЧН) при линеаризации характеристики управления по частоте и широкополосным амплитудным демодулятором (АД) (выпрямителем) при стабилизации амплитуды колебаний.
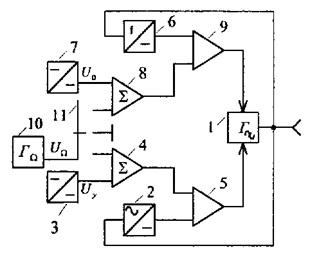 |
Рис. 8. Структурная схема управляемого по частоте и амплитуде
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
- Общие требования и основные компоненты СКУД
- Историко-научная основа научных и научно-технических прогнозов на примере люминофоров и особо чистых веществ
- Методы контроля оптико-механических приборов и приборов ночного видения
- Исследование полупроводникового стабилитрона
- Анализ преимуществ и недостатков электронных коммуникаций
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем