Сбор и обработка измерительной информации
По завершении процесса накопления содержимое ОЗУ через последовательный интерфейс (например, стандартный интерфейс RSC-232) пересылается в ЭВМ, где производится решение уравнений (1). Результатом этого решения будут коэффициенты усиления ФЭУ. Их представляют в относительных единицах (процентах) и сравнивают с коэффициентом усиления реперного канала, принимаемым условно за 100% (канал 100). Если
коэффициент усиления какого-либо канала существенно отличается от реперного, его корректируют, и возвращают новое значение в регистр ЦАП, управляющего режимом данного ФЭУ. Циклы накопления и коррекции коэффициентов усиления продолжаются до тех пор, пока отличия коэффициентов усиления ФЭУ от реперного канала не станут приемлемыми. Для наглядности ход настройки отображают на экране монитора ЭВМ в виде матрицы ФЭУ, где в кружках указывают относительную величину коэффициента усиления.
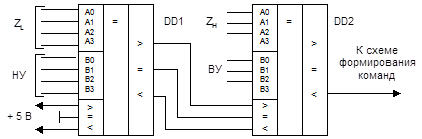
Для лучшего понимания цифровой амплитудной селекции полезно более подробно остановиться на некоторых особенностях цифрового компаратора. Его можно построить на двух микросхемах, например, К555СП1. Эти микросхемы представляют собой компараторы, сравнивающие два четырехразрядных числа А и В, и выдающие сигналы низкого уровня на трех выходах соответственно при выполнении условий A > B, A = B и A < B. Эти микросхемы имеют входы для наращивания, благодаря чему можно увеличивать разрядность сравниваемых чисел. Соединение микросхем в амплитудном селекторе показано на рис.4.
На компаратор DD1 подаются младшие разряды Z-сигнала ZL и код нижнего уровня НУ, а на DD2 – старшие разряды Z-сигнала и код верхнего уровня ВУ. Если Z-сигнал попадает в окно, т. е. он больше НУ и меньше ВУ, то вначале компаратор DD1 выдаст сигнал на выходе « > », а затем DD2 продолжит сравнение и выдаст сигнал на выходе « < », который поступит в схему формирования управляющих команд.
 |
|
Если же Z-сигнал не попадает в окно (Z < НУ или Z > ВУ), то сигнал на выходе «<» DD2 не появляется. При использовании в качестве разрядов ВУ разрядов Z11, Z10 и Z9, а для формирования НУ – разрядов Z8, Z7, Z6, Z5 энергетического сигнала диапазон изменения ВУ будет лежать в пределах 512 – 2048, а диапазон НУ – в пределах 32 – 256.
Достаточно длительный опыт эксплуатации ЭКТ показал, что настроенная детекторная система долгое время сохраняет свои основные параметры в допустимом диапазоне. Поэтому к «услугам» САНС приходится прибегать сравнительно редко (не более двух раз в год). По этим причинам обычно не используется и режим стабилизации, который занимает довольно много рабочего времени.
Рассмотрим теперь рабочий режим, когда в ЭВМ передаются сигналы для формирования изображения. Для этого используются первичные координатные и энергетический сигналы. Однако, прежде, чем попасть в ЭВМ, они проходят довольно сложный путь дополнительной коррекции. Как уже говорилось, эти поправки зависят от координат сцинтилляций и заранее известны. Поскольку поправки нужно вводить в реальном масштабе времени, т. е. немедленно, то эти преобразования выполняют аппаратными средствами (с такой проблемой мы встречались еще при изучении УЗ сканеров). Следовательно, поправочные коэффициенты, с помощью которых вычисляются сами поправки, должны храниться в ПЗУ, а первичные аналоговые сигналы – преобразовываться в цифровую форму.
Дальнейший путь преобразований зависит от типа и характеристик доступной для разработчика и производства элементной базы. В связи с этим надо еще раз заметить, что требуемая скорость передачи сигналов в ЭВМ весьма высока – она достигает 200000 импульсов (байт или слов при цифровой связи) за секунду. Так как эти сигналы приходится передавать на достаточно большое расстояние (несколько метров), то возникают определенные технические трудности при их передаче в цифровой форме. В модели ГКС-301Т они передаются в аналоговом виде, а в ЭВМ преобразуются в цифровую форму с помощью встроенных АЦП. Как видим, первичные аналоговые сигналы проходят многоступенчатое преобразование: сначала в цифровую форму (для вычисления поправок, а также для использования в процедуре накопления спектров), затем – снова в аналоговую – для получения скорректированных сигналов и посылки их в ЭВМ, где еще они раз преобразуются в цифровые.
Коррекция линейных искажений заключается в изменении первичных значений координат X, Y на некоторую величину (поправку) DX и DY, которые являются функциями этих же координат. Для этого используют различные аппроксимации, простейшей из которых является билинейная. При такой аппроксимации поправки вычисляются согласно алгоритму
DXi = K1i + K2iXi + K3iYi + K4iXiYi , (2)
DYi = K5i + K6iXi + K7iYi + K8iXiYi ,
где K1i, K2i и т. д. – коэффициенты, которые рассчитывают при настройке при помощи дырчатого фантома; Xi , Yi – младшие разряды координат.
Далее поправки DX и DY суммируют с исходными сигналами и получают скорректированные координаты
Хкор = Х + DХ и Yкор = Y+ DY.
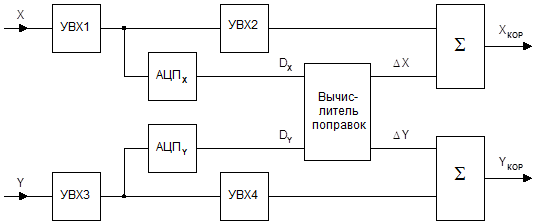
Если эта процедура выполняется в аналоговой форме, то все операнды в уравнениях (2) нужно представить в аналоговом виде. Структурная схема, выполняющая эти преобразования, показана на рис.5.
Первичный аналоговый сигнал Х поступает на УВХ1 и УВХ2 и преобразуется в цифровой код DX с помощью АЦПX. Аналогично преобразуется и сигнал Y. Цифровые координаты DX и DY поступают на входы вычислителя поправок, которые на его выходах появляются в аналоговом виде и суммируются с исходными аналоговыми сигналами. Очевидно, что в вычислителе поправок цифровые данные должны быть преобразованы в аналоговые величины. Структурная схема вычислителя поправок приведена на рис.6.
 |
Преобразования в этом блоке выполняются в соответствии с алгоритмом (2). На ПЗУ (по четыре на каждую координату) подаются старшие разряды координат, по которым извлекаются коэффициенты К1, К2 и т. д. Они умножаются в перемножающих ЦАП на аналоговые величины (UОП и др.), причем аналоговые множители, куда входят координатные сигналы и их произведения, формируются с помощью трех отдельных перемножающих ЦАП из младших разрядов и опорных напряжений. Далее отдельные слагаемые суммируют и получают поправку.
Подобным же образом производят и амплитудную коррекцию энергетического сигнала, но по более простому алгоритму
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем