Физика разрушения горных пород при бурении нефтяных и газовых скважин
Разности g1 = e2 e3 , g2 = e3 e1, g3 = e1 e2 определяют величину главных сдвигов.
Как и в случае с тензором напряженного состояния, тензор деформации можно разложить на два тензора, отвечающих за изменение объёма и формы «точки»:
Tд = TдШ + TдД,
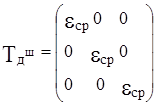
где TдШ – шаровой тензор, имеющий вид:
5 height=105 src="images/referats/10700/image015.png">
TдД – тензор-девиатор, имеющий вид:
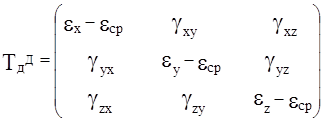
где e = (ez+ ey+ ex) /3 – средняя линейная относительная деформация.
Шаровый тензор определяет изменение объема «точки», а тензор-девиатор отвечает за изменение формы «точки».
Величина
ev = ez + ey + ex
характеризует относительное изменение объёма ДV/V элементарного куба, «точки». Этот вывод следует из следующего мысленного опыта. Если к «точке», имеющей форму куба, приложить три взаимно равных сжимающих напряжения, то «точка» будет находиться в состоянии гидростатического сжатия: P = x = y = z, а касательные напряжения в ней будут равны нулю. Приложенные нормальные напряжения вызовут укорочение ребер куба, а значит и уменьшение его объёма. Если первоначальную длину ребра куба принять равной единице, то относительное изменение объёма такого куба v будет равно следующей величине:
ev = DV/V = [( ) - ( )] / ( ) =
[1 (1 ex)(1 ey)(1 ez)] / 1.
Если не принимать во внимание величины второго и третьего порядка малости (т.е. произведения типа ezey, exezey), то легко получается окончательная формула
ev = ez + ey + ex.
Разделив правую и левую части этого равенства на число 3, получим связь между средней линейной относительной деформацией и относительной объемной деформацией
e = ev / 3.
Первый инвариант тензора девиатора, т.е. величина
ex e + ey e + ez e
тождественно равна нулю. Физически это означает, что сумма диагональных напряжений тензора девиатора не вызывает изменения объёма деформируемой точки.
Шаровой тензор деформаций Tдш, выраженный через главные линейные деформации, имеет вид:
 ,
,
где e = (e1 + e2 + e3) / 3 , а тензор-девиатор Tдд деформаций задается матрицей следующего содержания:
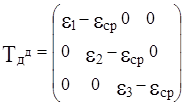 .
.
В механике сплошной среды (в теории пластичности) большое значение имеет второй инвариант девиатора деформаций
I2(T) = [(e1 e2)2 + (e2 e3)2 + (e3 e1)2] / 6,
который является суммарной характеристикой изменения формы деформируемого тела. Через второй инвариант девиатора деформаций I2(Tдд) выражаются интенсивность линейных деформаций i и интенсивность деформаций сдвига i:
ei = ![]() ;
;
gi = ![]() .
.
Через главные линейные деформации приведенные величины выражаются следующим образом:
ei = 20,5[ (e1 e2)2 + (e2 e3)2 + (e3 e1)2 ]0.5 / 3 , (3)
gi = (2/3)0,5 [ (e1 e2)2 + (e2 e3)2 + (e3 e1)2 ]0.5. (4)
Резюме: Деформация тела заключается в изменении формы, вызванном действием касательных напряжений, и в изменении объёма под действием всестороннего давления.
Такое разделение имеет важное значение при анализе законномерностей деформирования, т.к. эти виды деформаций описываются разными законами. С этими законами мы познакомимся в третьем разделе пособия. Здесь же отметим, что, например, и у упругих и у вязких тел объёмная деформация описывается одним уравнением: объёмная деформация прямо пропорциональна всестороннему давлению. А вот сопротивление формоизменению у этих тел резко отличается: если у упругих тел форма изменяется пропорционально напряжению сдвига, то вязкие тела вообще не могут сохранять форму и сопротивляться сдвигу.
2.2 Инвариантные соотношения для напряжений и деформацийпри различных напряженных состояниях
При изучении напряженно-деформированного состояния тела используют не сами тензоры, а их инварианты.
С помощью главных нормальных напряжений 1 >2 >3 можно задать различные напряженные состояния, при которых определяют прочность тел:
1. Одноосное сжатие
s1 > 0, s2 = s3 = 0 e1 > 0, e2 = e3 = ne1,
где – коэффициент поперечной деформации.
2. Одноосное растяжение
s1 = s2 = 0, s3 < 0 e1 = e2 = ne3.
3. Чистый сдвиг
s1 = s3 = t, s2 = 0 e1 = e3 = g/2, e2 = 0.
4. Осесимметричное трехосное сжатие (нагружение Кармана)
s1 > s2 = s3 > 0 e1 > 0, e2 = e3 < 0.
5. Радиальное сжатие (нагружение Бёкера)
s1 = s2 > s3 > 0 e1 = e2 > 0, e3 < 0.
6. Всестороннее равномерное сжатие
s1 = s2 = s3 = P e1 = e2 = e3 = eV/3.
7. Сжатие без возможного бокового расширения (компрессия)
s1 > 0, s2 = s3 = s1n/(1n) e1 > 0, e2 = e3 = 0.
8. Трехосное неравнокомпонентное сжатие
s1 ¹ s2 ¹ s3 > 0 e1 ¹ e2 ¹ e3 > 0.
Подставив в выражения (1 – 4) для величин si, ti, ei, gI , приведенные выше значения главных нормальных напряжений и главных линейных деформаций, получим значения этих обобщенных напряжений, описывающих перечисленные напряженные состояния (табл. 2, 3).
В качестве примера определим значения обобщенных напряжений для чистого сдвига:
1. Второй инвариант тензора-девиатора напряжений
I2(T) = [(s1 s2)2 + (s2 s3)2 + (s1 s3)2] / 6 =
= [( s3)2 + (s3)2 + ( s3 s3)2] / 6 = s32 = t2.
2. Интенсивность нормальных напряжений
Другие рефераты на тему «Геология, гидрология и геодезия»:
Поиск рефератов
Последние рефераты раздела
- Анализ условий формирования и расчет основных статистических характеристик стока реки Кегеты
- Геодезический чертеж. Теодолит
- Геодезические методы анализа высотных и плановых деформаций инженерных сооружений
- Асбест
- Балтийско-Польский артезианский бассейн
- Безамбарное бурение
- Бурение нефтяных и газовых скважин