Прецизионные координатные системы с линейными шаговыми двигателями
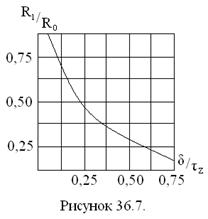
Рисунок 3. Модуляция зубчатой структурой магнитного сопротивления воздушного зазора.
Это обстоятельство наряду с технологическими сложностями изготовления зубчатых структур с малым зубцовым делением обусловлено тем фактом, что ЛШД изготавливается с τz=0,2-1мм при воздушном зазоре δ=
10-20мкм.
При четырехкратной дискретной разнополярной коммутации обмоток модулей А и В, якорь перемещается с шагом равным τz/4, что в линейных размерах соответствует 0,05-0,25 мм. Для большинства прецизионных координатных систем такая дискретность недостаточна.
Снижение величины единичного шага добивается способами управления, использующими электрическое дробление основного шага ЛШД.
Если формировать МДС обмоток модулей по синусоидальному закону ![]() ;
; ![]() , то зависимость тягового синхронизирующего усилия представляется в виде:
, то зависимость тягового синхронизирующего усилия представляется в виде:  . (8)
. (8)
Характеристика синхронизирующего усилия имеет синусоидальную форму и в отсутствии внешней силы сопротивления по координате Х якорь ЛШД фиксируется в позиции установленной управляющими фазами токов ![]() .
.
Таким образом на протяжении зубцового деления можно иметь в пределе любое число статически устойчивых положений якоря, задаваемых текущим значением аргумента управляющих синус-косинусных токов фаз.
Обычно управляющие токи фаз ЛШД формируются с использованием цифровой техники при конечном сочетании уровней токов в фазах, что обеспечивает ряд дискретных позиций якоря в пределах зубцового деления. Синус-косинусные функции токов фаз получаются квантованными во времени.
Особенностью ЛШД на аэростатических опорах является отсутствие внешнего демпфирования нагрузки. Поэтому возникает проблема с остановом двигателя в заданной позиции.
Для ее решения устанавливается еще пара блоков работающих с противоположным тяговым усилием.
Современные координатные столы для МЭ могут быть охарактеризованы следующими параметрами:
· При дискретности перемещения 10 мкм максимальная скорость перемещения достигает 500 мм/с при максимальном ускорении до 40 м/с2. При дискретности перемещения 1 мкм максимальная скорость достигает 150 мм/c при наибольшем ускорении до 20 м/с2.
Преимущества:
1. Отсутствие механических контактов.
2. Высокие точности позиционирования.
3. Высокое быстродействие.
4. Простота управления.
5. Отсутствие механических направляющих.
Недостатки:
1. Затруднительная унификация.
2. На воздушной подушке нельзя в вакуум.
3. Трудности с торможением.
ЛИТЕРАТУРА
|
1.Орлов П.И. Основы конструирования. Справочно-методическое пособие. В 2-х кн. Кн.1. /Под ред. П.Н.Учаева. — 3-е изд. испр. — М.: Машиностроение |
|
2.Конструирование приборов: В 2-х кн. /Под ред. В.Краузе; Пер. с нем. В.Н.Пальянова; Под ред. О.Ф.Тищенко. —Кн.1. М.: Машиностроение |
|
3. Конструирование приборов: В 2-х кн. /Под ред. В.Краузе; Пер. с нем. В.Н.Пальянова; Под ред. О.Ф.Тищенко. — Кн.2. М.: Машиностроение |
|
4.Попов В.Ф., Горин Ю.Н. Процессы и установки электронно-ионной технологии:Учеб. пособие для вузов.— М.: Высш. шк., |
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем