Анализ задачи общего воздействия динамическим магнитным полем на человека и формирование требований на технические средства комплексной магнитотерапии
 (1)
(1)
Из последнего соотношения определим размер эффективного действия ячейки:
![]() (2)
(2)
Тогда размер ячейки составит![]() Техническая реализуемость диктует размеры источника излучения в пределах Dя = 3 .
Техническая реализуемость диктует размеры источника излучения в пределах Dя = 3 .
5 см. Тогда размер одной элементарной ячейки магнитного поля D = 2,41-Dя, = 2,41(3 .5) может быть определен в пределах D = 7 .12 см.
Следовательно, на длине конечности L-1 м должно быть сформировано от 8 до 14 ячеек, а по длине всего тела человека 16 .30 ячеек. Таким образом, порядок размерностей ячеек и процессов определился в пределах 8 .30, т.е. значения m и n (рис.1) также должны находиться в пределах 8 .30. При этом необходимо учесть, что определяющим фактором в расчете размеров явилась физическая реализуемость источников магнитного поля на современном уровне развития техники.
Анализ метрики поля
Выше проанализирована пространственная метрика ячеистой структуры динамического магнитного поля, создаваемого вокруг человека. Причем диаметр Dя одной ячейки магнитного поля должен находиться в пределах 7 .12 см.
На следующем этапе анализа следует выяснить необходимое количество ячеек для формирования замкнутого магнитного поля вокруг человека. Обозначим общую площадь поверхности тела человека Sn и рассчитаем необходимое число ячеек в соответствии с выражением:
![]() (3)
(3)
Если принять общую площадь поверхности тела человека в среднем равную Sn = 40000 см2 (с запасом на комфортное расположение пациента), то общее число ячеек определится в пределах N = 400 .1000.
Обратимся теперь к вопросу формирования конфигурации объема магнитного поля вокруг человека. Очевидно, что пространственная структура макрополя, окружающая все тело пациента в целом, имеет немаловажное значение для достижения высокоэффективного лечения. Можно предложить множество моделей конфигурации ячеистой структуры излучателей:
· в форме плоскости, на которой располагается человек;
· в форме двух плоскостей, между которыми располагается человек;
· в форме цилиндра, внутри которого располагается человек;
· по форме тела человека и др.
Конфигурации перечислены в порядке усложнения конструкции. Здравый смысл подсказывает, что, по-видимому, наиболее эффективной будет конструкция, учитывающая форму тела человека. Однако реализация ее в виде гибкого эластичного костюма (напоминающего гидрокостюм) вряд ли окажется целесообразной, прежде всего из-за массы конструкции (порядка 100 кг). Поэтому безусловно требуется некоторый жесткий каркас, воспринимающий всю нагрузку. В этом плане сформировались следующие направления конструирования МТА общего воздействия.
В первом из них для всех конечностей, головы и туловища человека формируются цилиндры жесткой конструкции, в которые необходимо поместить пациента для проведения сеанса магнитотерапии, что не так просто для больного человека.
Во втором для каждой конечности, головы и туловища создается некая упруго сгибающаяся в цилиндр плоскость, которая держит свою форму за счет упругих сил. Исходно на эти плоскости ложится пациент, а затем уже на частях его тела формируются цилиндры.
В третьем изготавливаются две жесткие полусферы по форме тела человека (скорлупы), в которых размещены индукторы. В нижнюю укладывается пациент и закрывается верхней.
Второй и третий подходы являются наиболее приемлемыми для конструирования средства, обеспечивающего целесообразную модель конфигурации магнитного поля, учитывающую форму тела человека.
Таким образом, задача, связанная с техническим решением направленного формирования в заданной физической точке пространства вектора магнитной индукции, в конечном итоге наиболее целесообразно решается путем генерации магнитного поля в конфигурации тела человека с помощью конструкции, собираемой из излучающих плоскостей ячеистой структуры с числом ячеек в пределах 400 .1000.
Анализ метрики управления
Перейдем к решению второй задачи, связанной с системой электронного формирования и управления электрическими токами и напряжениями с целью получения заданной динамики (перемещения во времени и пространстве) векторов магнитной индукции в каждой ячейке заданного объема.
Прежде всего обратим внимание на то, что излучатели магнитного поля исходно имеют вид плоскостей, из которых формируется затем объем по форме тела человека. Следовательно, управление ячеистой структурой на плоскости в общем виде наиболее целесообразно представить матричной организацией NxM (рис.2). Так как по нашим расчетам число ячеек находится в пределах 400 .1000, то в случае использования квадратной матрицы ее размерность в среднем равна 2020. Данная размерность достаточно велика для реализации, хотя и выполнима. Проанализируем возможности ее уменьшения. Прежде всего обратимся к определенной симметричности тела человека и достаточному единообразию функционирования его частей. При этом выделим 6 макрочастей тела человека: 2 ноги, 2 руки, голова и туловище.
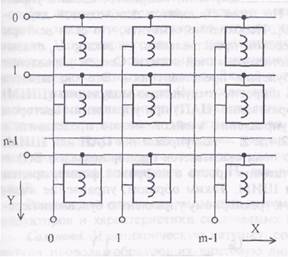
Рисунок 2 – Ячеистая структура плоскости, создающее магнитное поле.
Четыре из выделенных частей (ноги и руки действительно обладают единообразием функционирования, чего однако никак нельзя сказать относительно остальных частей. Тогда, принимая во внимание, что суммарная площадь поверхности ног и рук составляет около 2/3 общей площади поверхности тела человека, то независимой становится площадь, равная
![]() (4)
(4)
или, в нашем случае, независимое управление достаточно организовать в числе ячеек в пределах 200 .500, при этом размерность квадратной матрицы снижается в среднем до 16x16. Однако и эта размерность достаточна велика, поэтому для дальнейшего упрощения можно всю площадь разбить на шесть единообразных матриц, работающих параллельно. Тогда независимое управление достаточно организовать в числе ячеек 60 .160 и свести к размерности матрицы управления 8x8, что особенно удобно при использовании микропроцессорных средств управления.
Важной подзадачей электронного управления является формирование заданной величины и направления тока в одной ячейке матрицы излучения независимо от других ячеек. Выделим ячейку и управляющие элементы, представленные на рис.3. Вектор индукции магнитного поля В(Т) - {Y,X,Uy) Ux} представляет собой функцию векторов управления ключами Ку (строка матрицы), Кx (столбец матрицы) и векторов напряжений Uy и Ux, Выделим множество, при котором В(I) отлично от нуля. Это множество соответствует следующим условиям: Yi&Xj- - I, Uy ф Ux. При этом вектор индукции магнитного поля пропорционален В(I) = (Uy - Ux) /Qя, где Qя - общее сопротивление индуктора, расположенного в ячейке. Упростим вектор управления с четырех - до трехмерного. Это оказывается возможным, если, например, сделать управляющее напряжение Ux = 0. Но тогда становится необходимой двухполярная реализация вектора Uy. Необходимо отметить, что если векторы управления Y,X задать в булевском представлении, то вектор Uy оказывается в представлениях бесконечнозначной логики. Сведем управление ячейкой исключительно к булевым представлениям. Это оказывается возможным, если применить широтно-импульсную модуляцию (ШИМ) или цифро-аналоговое преобразование (ЦАП) при управлении вектором индукции. Тогда структуру управления ячейкой можно представить в виде, показанном на рис.4, где Z - код управления ЦАП или ШИМ. При этом вектор магнитного поля оказывается пропорционален В(I) - Z(Y&X), что реализовать достаточно просто в цифровой форме, причем наиболее просто реализуется ШИМ. Таким образом, управление ячейками матрицы удалось свести к трехмерному управлению булевыми переменными.
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем