Теория управления. Принципы системного анализа
Позднее в определениях системы появляется понятие цели. Так, в «Философском словаре» система определяется как «совокупность элементов, находящихся в отношениях и связях между собой определенным образом и образующих некоторое целостное единство».
В последнее время в определение понятия системы наряду с элементами, связями и их свойствами и целями начинают включать наблюдателя, хотя впервые н
а необходимость учета взаимодействия между исследователем и изучаемой системой указал один из основоположников кибернетики У.Р. Эшби.
М. Масарович и Я. Такахара в книге «Общая теория систем» считают, что система – «формальная взаимосвязь между наблюдаемыми признаками и свойствами».
Таким образом, в зависимости от количества учитываемых факторов и степени абстрактности определение понятия «система» можно представить в следующей символьной форме. Каждое определение обозначим порядковым номером, совпадающим с количеством учитываемых в определении факторов.
1. Система есть нечто целое:
S=A(1,0).
Это определение выражает факт существования и целостности. Двоичное суждение A(1,0) либо 1, либо 0 отображает наличие или отсутствие этих качеств.
2. Система есть организованное множество (Темников Ф.Е.):
S=(орг, М),
где орг – оператор организации; М – множество.
3. Система есть множество вещей, свойств и отношений (Уемов А.И.):
S=({m},{n},{r}),
где m – вещи, n– свойства, r – отношения.
4. Система есть множество элементов, образующих структуру и обеспечивающих определенное поведение в условиях окружающей среды:
S=(ε, ST, BE, E),
где ε – элементы, ST – структура, ВЕ – поведение, Е – среда.
5. Система есть множество входов, множество выходов, множество состояний, характеризуемых оператором переходов и оператором выходов:
S=(X, Y, Z, H, G),
где X – входы, Y – выходы, Z – состояния, Н – оператор переходов, G – оператор выходов. Это определение учитывает все основные компоненты, рассматриваемые в автоматике.
6. Это определение соответствует уровню биосистем и учитывает генетическое (родовое) начало GN, условия существования KD, обменные явления KD, развитие EV, функционирование FC и репродукцию (воспроизведения) RP:
S= (GN, KD, MB, EF, FC, RP).
7. Это определение оперирует понятиями модели F, связи SC, пересчета R, самообучения FL, самоорганизации FO, проводимости связей СО и возбуждения моделей JN:
S=(F, SC, R, FL, FO, CO, JN).
Данное определение удобно при нейрокибернетических исследованиях.
8. Если определение 5 дополнить фактором времени и функциональными связями, то получим определение системы, которым обычно оперируют в теории автоматического управления.
S= ( T, X, Y, Z, Ω, V, η, φ )
где Т – время, Х – входы, Y – выход, Z – состояния, Ω – класс операторов на выходе, V – значения операторов на выходе,η – функциональная связь в уравнении
y(t2)=η[x(t1), z(t1], t2),
φ – функциональная связь в управлении z(t2)=φ[x(t1), z(t1), t2].
9. Для организационных систем удобно в определении системы учитывать следующее: цели и планы, внешние и внутренние ресурсы, исполнители, процесс, помехи, контроль, управление, эффект.
S=(PL, RO, RJ, EX, PR, DT, SV, RD, EF),
где РL – цели и планы, RО – внешние ресурсы, RJ – внутренние ресурсы, EX – исполнители, PR – процесс, DT – помехи, SV – контроль, RD – управление, EF – эффект.
Последовательность определений можно продолжить и далее, которые учитывали бы такое количество элементов, связей и действий в реальной системе, которое необходимо для решаемой задачи, для достижения поставленной цели. В качестве «рабочего» определения понятия системы в литературе по теории систем часто рассматривается следующее:
Система – множество элементов, находящихся в отношениях и связях друг с другом, которое образует определенную целостность, единство.
Рассмотрим основные понятия, характеризующие строение и функционирование систем.
Элемент – простейшая неделимая часть системы (рис. 1). Ответ на вопрос, что является такой частью, может быть неоднозначным и зависит от цели рассмотрения объекта как системы, от точки зрения на него или от аспекта его изучения. Таким образом, элемент – это предел членения системы с точек зрения решения конкретной задачи и поставленной цели. Систему можно расчленить на элементы различными способами в зависимости от формулировки цели и ее уточнения в процессе исследования.
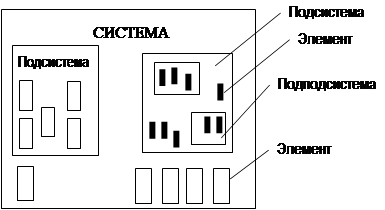
Рис. 1. Состав системы
Подсистема. Система может быть разделена на элементы не сразу, а последовательным расчленением на подсистемы, которые представляют собой компоненты более крупные, чем элементы, и в то же время более детальные, чем система в целом (рис. 1). Возможность деления системы на подсистемы связана с вычленением совокупностей взаимосвязанных элементов, способных выполнять относительно независимые функции, подцели, направленные на достижение общей цели системы. Названием «подсистема» подчеркивается, что такая часть должна обладать свойствами системы (в частности, свойством целостности). Этим подсистема отличается от простой группы элементов, для которой не сформулирована подцель и не выполняются свойства целостности (для такой группы используется название «компоненты»). Например, подсистемы автоматизированной системы управления, подсистемы пассажирского транспорта крупного города.
Структура. Это понятие происходит от латинского слова structure, означающего строение, расположение, порядок. Структура отражает наиболее существенные взаимоотношения между элементами и их группами (компонентами, подсистемами), которые мало меняются при изменениях в системе и обеспечивают существование системы и ее основных свойств. Структура – это совокупность элементов и связей между ними. Структура может быть представлена графически, в виде теоретико-множественных описаний, матриц, графов и других языков моделирования структур.
Структуру часто представляют в виде иерархии. Иерархия– это упорядоченность компонентов по степени важности (многоступенчатость, служебная лестница). Между уровнями иерархической структуры могут существовать взаимоотношения строгого подчинения компонентов (узлов) нижележащего уровня одному из компонентов вышележащего уровня, т.е. отношения, так называемого древовидного порядка. Такие иерархии называют сильными или иерархиями типа «дерева». Они имеют ряд особенностей, делающих их удобным средством представления систем управления. Однако могут быть связи и в пределах одного уровня иерархии. Один и тот же узел нижележащего уровня может быть одновременно подчинен нескольким узлам вышележащего уровня. Такие структуры называют иерархическимиструктурами со слабыми связями. Между уровнями иерархической структуры могут существовать и более сложные взаимоотношения, например, типа «страт», «слоев», «эшелонов». Примеры иерархических структур: энергетические системы, автоматизированные системы управления, государственный аппарат.
Другие рефераты на тему «Безопасность жизнедеятельности и охрана труда»:
- Требования к организации рабочего места менеджера
- Анализ деятельности исламской банковской системы
- Акустическая оценка уровней городского транспортного шума
- Формы трудовой деятельности. Нормирование ионизирующего излучения
- Обеспечение безопасности, прогнозирование и разработка мероприятий по предупреждению и ликвидации чрезвычайной ситуации на компрессорной станции
Поиск рефератов
Последние рефераты раздела
- О средствах защиты органов дыхания от промышленных аэрозолей
- Обзор результатов производственных испытаний средств индивидуальной защиты органов дыхания (СИЗОД)
- О средствах индивидуальной защиты от пыли
- И маски любят счёт
- Правильное использование противогазов в профилактике профзаболеваний
- Снижение вредного воздействия загрязнённого воздуха на рабочих с помощью СИЗ органов дыхания
- О средствах индивидуальной защиты органов дыхания работающих