Описание систем управления беспилотными летательными аппаратами
размеры, мм: блок автопилота - 80 х 47 х 10; ИНС – 98 х 70 х 21; приемник СНС - 30 х 30 х 10; вес, кг: блок автопилота - 0,120; ИНС - 0,160; приемник СНС - 0,03. Электрические характеристики: напряжение питания, В - 10 .27; потребляемая мощность (макс.), Вт - 5. Окружающая среда: температура, град С - от –40 до +70; вибрация/удар, g - 20.
Управление: порты RS-232 (2) - прием/передача данных
; порты RS-422 (5) – связь с внешними устройствами; каналы ШИМ (12) - управляющие устройства; программируемые ППМ (255) - поворотные пункты маршрута. Рабочие диапазоны: крен - ±180°; тангаж - ±90°; курс (путевой угол) - 0 .360; ускорение - ±10 g; угловая скорость - ±150°/сек
Система управления пространственным положением остронаправленных антенных систем в комплексах БЛА
Сам по себе беспилотный летательный аппарат (БЛА) – лишь часть сложного комплекса, одна из основных задач которого – оперативное доведение полученных сведений до оперативного персонала пункта управления (ПУ). Возможность обеспечения устойчивой связи является одной из важнейших характеристик, определяющих эксплуатационные возможности комплекса управления БЛА и обеспечивает доведение сведений, полученных БЛА, в режиме «реального времени» до оперативного персонала ПУ. Для обеспечения связи на значительные расстояния и повышения помехозащищенности за счет пространственной селекции в комплексах управления БЛА широко используются остронаправленные антенные системы (АС) как на ПУ, так и на БЛА. Функциональная схема системы управления пространственным положением остронаправленной АС, обеспечивающая оптимизацию процесса вхождения в связь в комплексах управления БЛА, приведена на рис. 1.
Система управления остронаправленной АС (см. рис. 1) включает в себя:
• Собственно остронаправленную АС, радиотехнические параметры которой выбираются, исходя из требований обеспечения необходимой дальности связи по радиолинии.
• Сервопривод АС, обеспечивающий пространственную ориентацию ДН АС в направлении ожидаемого появления излучения объекта связи.
• Систему автоматического сопровождения по направлению (АСН), обеспечивающую устойчивое автосопровождение объекта связи в зоне уверенного захвата пеленгационной характеристики системы АСН.
• Радиоприемного устройства, обеспечивающего формирование сигнала «Связь», свидетельствующего о приеме информации с заданным качеством.
• Процессор управления антенной системой, обеспечивающий анализ текущего состояния системы управления АС, формирование сигналов управления сервоприводом для обеспечения пространственной ориентации АС в соответствии с полетным заданием и алгоритмом пространственного сканирования, анализ наличия связи, анализ возможности перевода сервопривода АС из режима «Внешнее управление» в режим «Автосопровождение», формирование сигнала перевода сервопривода АС в режим «Внешнее управление».

Рис. 1. Функциональная схема системы управления пространственным положением остронаправленной АС в комплексах управления БЛА
Основная задача, выполняемая системой управления пространственным положением остронаправленной АС, – обеспечить устойчивое вхождение в связь с объектом, заданным полетным заданием.
Эта задача распадается на ряд подзадач:
• Обеспечение пространственной ориентации ДН АС в направлении ожидаемого появления излучения объекта связи и ее пространственной стабилизации для случая расположения АС на борту летательного аппарата.
• Расширение зоны устойчивого захвата излучения объекта связи за счет применения дискретного алгоритма пространственного сканирования с детерминированной пространственно-временной структурой.
• Переход в режим устойчивого автосопровождения объекта связи системой АСН при обнаружении объекта связи.
• Обеспечение возможности повторного вхождения в связь в случае ее срыва. Для дискретного алгоритма пространственного сканирования с детерминированной пространственно-временной структурой можно выделить следующие особенности:
• Сканирование ДН АС осуществляется дискретно во времени и в пространстве. • Пространственные перемещения ДН АС при сканировании осуществляются таким образом, чтобы не оставалось пространственных зон, которые не перекрываются зоной уверенного захвата система АСН за весь цикл сканирования (см. рис.2).
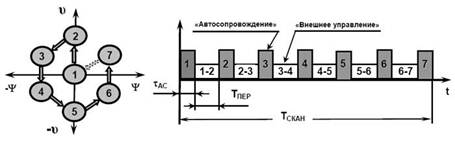
Рис.2. Пример организации дискретного пространственного сканирования в азимутальной и угломестной плоскостях
Для каждого конкретного пространственного положения, определяемого алгоритмом сканирования, можно выделить две фазы: «Автосопровождение» и «Внешнее управление».
• В фазе «Автосопровождение» система АСН осуществляет оценку возможности приема излучения объекта связи для выбранного пространственного положения РСН.
В случае положительного результата оценки: Пространственное сканирование прекращается. Система АСН продолжает осуществлять автосопровождение излучения объекта связи по своему внутреннему алгоритму. На вход сервопривода АС поступают сигналы пространственной ориентации АС по данным текущего пеленга объекта связи от системы АСН XАСН(t). В случае отрицательного результата оценки: Осуществляется пространственное перемещение РСН АС в следующее пространственное положение, определяемое алгоритмом сканирования.
• В фазе «Внешнее управление» на выходе процессора управления антенной системой формируются сигналы управления сервоприводом АС. Компоненты сигнала управления сервоприводом обеспечивают:
X0 – первоначальную пространственную ориентацию ДН АС в направлении на объект связи; ∆XЛА(t)–парирование пространственных эволюций летательного аппарата; XАЛГ(t) – расширение зоны устойчивого захвата излучения объекта связи системы АСН в соответствии с дискретным алгоритмом пространственного сканирования с детерминированной пространственно-временной структурой.
В случае срыва связи, начиная с момента времени ТСВ=0 (пропадание сигнала «СВЯЗЬ»), сигнал XАСН(ТСВ=0) запоминается в устройстве «Вычисления и хранения», и используется в дальнейшем процессором управления АС в качестве значения ожидаемого пеленга объекта связи. Процесс вхождения в связь повторяется как описано выше. В режиме «Внешнее управление» сигнал управления сервоприводом остронаправленной АС по каналам «курс», «тангаж» и «крен» может быть записан
 (1)
(1)
В режиме «Автосопровождение» сигнал управления сервоприводом остронаправленной АС может быть записан
 (2)
(2)
Конкретный вид сигналов управления определяется конструктивными особенностями сервопривода антенной системы.