Постановка и основные свойства транспортной задачи
Решение транспортной задачи при вырожденном опорном плане
Опорный план называется вырожденным, если число его ненулевых перевозок k меньше ранга матрицы ограничений. В процессе построения начального плана или при его улучшении очередной план может оказаться вырожденным.
Рассмотрим два случая.
1. Вырожденный план является начальным Х0. Тогда выбирают некоторые н
улевые элементы матрицы Х0 в качестве базисных так, чтобы при этом не нарушалось условие базисного плана. Число этих элементов равняется ![]() . Далее данные элементы заменяют на
. Далее данные элементы заменяют на ![]() (где
(где ![]() – произвольное, бесконечно малое число) и рассматривают их как обычные базисные элементы плана. Задачу решают как невырожденную, а в последнем оптимальном плане Хk вместо
– произвольное, бесконечно малое число) и рассматривают их как обычные базисные элементы плана. Задачу решают как невырожденную, а в последнем оптимальном плане Хk вместо![]() пишут нули.
пишут нули.
2. Вырожденный план получается при построении плана Хk+1 на базе Хk, если цепочка в плане Хk содержит не менее двух минимальных нечетных элементов. В таком случае в матрице Хk+1 полагают равным нулю только один из этих элементов, а остальные заменяют на ![]() , и далее решают задачу как невырожденную. Если на k-м шаге
, и далее решают задачу как невырожденную. Если на k-м шаге ![]() , то при переходе от Хk к Хk+1 значение целевой функции не изменяется, а в базис вводится элемент
, то при переходе от Хk к Хk+1 значение целевой функции не изменяется, а в базис вводится элемент ![]() , для которого перевозка станет равной
, для которого перевозка станет равной ![]() .
.
Пример 2. Решим Т-задачу со следующими условиями (см. Табл.6)
Проверим условие баланса ![]()
Предварительный этап. Методом минимального элемента строим начальный базисный план Х0 (Табл. 5)
Таблица 5
|
C = |
ai bj |
4 |
6 |
8 |
6 |
|
6 |
2(5) |
2(4) |
3(6) |
4(11) | |
|
8 |
6(12) |
4(10) |
3(9) |
1(3) | |
|
10 |
1(1) |
2(6) |
2(7) |
1(2) |
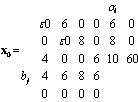
Так как m + n – 1 = 6; k = 4, то план х0 – вырожденный; l = m+ n -1 – k = 2.
Два нулевых элемента Х0 делаем базисными так, чтобы не нарушить условие опорности. Выберем в качестве базисных элементов ![]() ,
, ![]() и положим их равными .
и положим их равными .
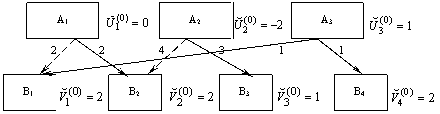
Схема перевозок для плана Х0 показана на рис. 6.
|
| |||||||
Рис. 6.
Для вычисления предварительных потенциалов выберем начальный пункт А1 и допустим, что ![]() . Потенциалы всех остальных пунктов вычисляем по формулам
. Потенциалы всех остальных пунктов вычисляем по формулам
![]() ,
, ![]()
Для проверки оптимальности плана х0 строим матрицу С1, элементы которой вычисляем по соотношению
![]()

Так как в матрице С1 элемент С23 = – 3 < 0, то план Х0 – неоптимальный.
Первая итерация. Второй этап.
|
|
|
|
|
|
| |||||||||
|
* |
6* |
0 |
0 |
|
6 |
0 |
0 | |||||||
|
X0 = |
|
|
* |
8 |
0+ |
|
X1 = |
0 |
0 |
6 |
| |||
|
4 |
0 |
0 |
6* |
1 = |
4 |
0 |
0 |
6 | ||||||
|
|
Другие рефераты на тему «Экономико-математическое моделирование»:
Поиск рефератов
Последние рефераты раздела
- Выборочные исследования в эконометрике
- Временные характеристики и функция времени. Графическое представление частотных характеристик
- Автоматизированный априорный анализ статистической совокупности в среде MS Excel
- Биматричные игры. Поиск равновесных ситуаций
- Анализ рядов распределения
- Анализ состояния финансовых рынков на основе методов нелинейной динамики
- Безработица - основные определения и измерение. Потоки, запасы, утечки, инъекции в модели