Автоматический литейный конвейер
Введение
Человеческое общество постоянно испытывает потребности в новых видах продукции, либо в сокращении затрат труда при производстве основной продукции. В общих случаях эти потребности могут быть удовлетворены только с помощью новых технологических процессов и новых машин, необходимых для их выполнения. Следовательно, стимулом к созданию новой машины всегда является новый технологичес
кий процесс, возможность которого зависит от уровня научного и технического развития человеческого общества.
В данной курсовой работе разрабатывается автоматическая линия конвейера для заливки литейных форм расплавленным металлом с целью получения отливок. Рассматриваемый конвейер горизонтальный пластинчатый с цепным тяговым элементом.
Основная цель курсовой работы разработать и рассчитать тихоходный вал конвейера. По ходу расчета подобрать асинхронный двигатель, рассчитать соответствующие элементы кинематической схемы, провести динамический расчет системы.
1 Массовые силовые и геометрические характеристики устройств
межоперационного транспорта
1.1 Массы изделий, технологического оборудования, подвижных
элементов устройства
Массы изделий постоянны на дооперационном (М1, кг) и после операционном (М2, кг) отрезках L1,м и L2,м , то масса изделий на обоих отрезках:
![]() , (1.1)
, (1.1)
где I- шаг установки изделий, м.
![]() , (кг)
, (кг)
1.2 Расчет исполнительный механизм пластинчатого цепного
конвейера
Исполнительный механизм пластинчатого цепного конвейера является вал тяговых звездочек, который приводит в движение двухрядную втулочную-катковую цепь с грузонесущими устройствами, суммарная масса которых:
![]() , (1.2)
, (1.2)
![]() , (кг)
, (кг)
Минимальное натяжения цепей в точке сбегания с тяговых звездочек принимается для выбирания люфтов в звеньях тяговой цепи:
![]() , (Н) (1.3)
, (Н) (1.3)
Максимальное натяжение цепей в точки набегания на тяговые звездочки:
![]() , (1.4)
, (1.4)
где g = 9,81 ![]() , w = 0,1 – коэффициент сопротивления перемещению тяговой цепи на катках по направляющим.
, w = 0,1 – коэффициент сопротивления перемещению тяговой цепи на катках по направляющим.
![]() , (Н)
, (Н)
Разрушающая нагрузка одного радя цепи:
![]() , (1.5)
, (1.5)
![]() =21150*6/2=63451, (Н)
=21150*6/2=63451, (Н)
Шаг ![]() втулочно-катковой цепи типа ВКГ, ГОСТ 588-64, принимаем в зависимости от
втулочно-катковой цепи типа ВКГ, ГОСТ 588-64, принимаем в зависимости от ![]() из ряда:
из ряда:
Таблица – 1 Зависимость ![]() от
от ![]()
|
|
13 |
60 |
125 |
|
|
100 |
125 |
150 |
Согласно таблицы 1 принимаем значения ![]() =125мм.
=125мм.
Число зубьев звездочки z принимаем 10.
Диаметр начальной окружности тяговой звездочки:
![]() , (1.6)
, (1.6)
![]() , (мм)
, (мм)
Расстояние между плоскостями тяговых звездочек выбираем по ориентировочному соотношению В=1,5*![]() , ближайшее из ряда: 200, 250, 320, 400, 500, 630, 800, 1000, 1250, 1500, (мм)
, ближайшее из ряда: 200, 250, 320, 400, 500, 630, 800, 1000, 1250, 1500, (мм)
Расчетное значения В=607, поэтому принимаем В= 630.
Тяговое сопротивления цепей на звездочках:
![]() , (1.7)
, (1.7)
![]() , (Н)
, (Н)
Крутящий момент на валу звездочек с учетом КПД подшипников качения 0,99:
![]() , (1.8)
, (1.8)
![]() , (Н*м)
, (Н*м)
Мощность необходимая на валу тяговых звездочек (на выходе):
![]() , (1.9)
, (1.9)
![]() , (кВт)
, (кВт)
Частота вращения вала тяговых звездочек (на выходе):
![]() , (1.10)
, (1.10)
![]() , (об/мин)
, (об/мин)
Ориентировочный диаметр вала звездочек цепного конвейера:
 , (1.11)
, (1.11)
где ![]() - допускаемое напряжения,
- допускаемое напряжения, ![]() =20 мПа.
=20 мПа.
![]() ,(мм)
,(мм)
2 Расчет электродвигателя
2.1 Подбор электродвигателя
Основной задачей на этапе конструирования привода является минимизация его стоимости и габаритных размеров при обеспечении надежности и технологичности. Это достигается оптимальным соотношением параметров привода и электродвигателя по рекомендуемым значениям передаточных чисел всех его элементов, которые основаны на опыте инженерной практике.
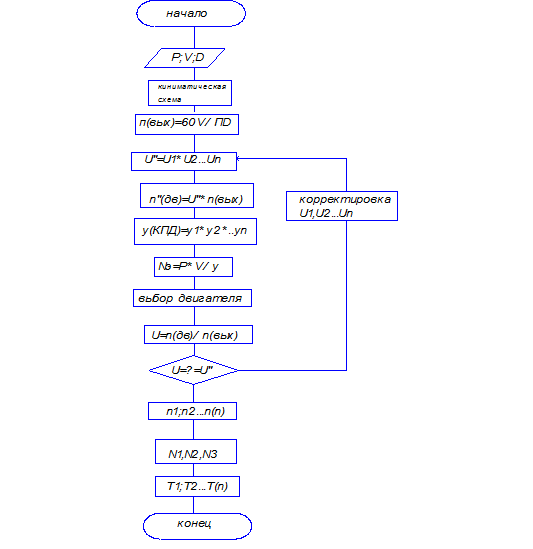
Рисунок 1 Схема алгоритма подбора электродвигателя и разбивки передаточных чисел привода
Проектирования привода осуществляем по алгоритму приведенному на рисунке 1.
2.2 Кинематическая схема привода
Составим кинематическую схему привода согласно заданию (рисунок 2). Вводим обозначения: n- частота вращения вала, N – передаваемая мощность на соответствующем валу, U – передаточное число элементов привода, ![]() - к.п.д. элементов привода.
- к.п.д. элементов привода.
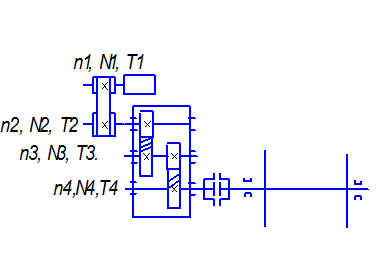
Рисунок 2 Кинематическая схема привода
Общий коэффициент полезного действия привода находим как произведение к.п.д. входящих узлов трения:
![]() =
= ![]() , (2.1)
, (2.1)
где ![]() - к.п.д ременной передачи,
- к.п.д ременной передачи, ![]() - зубчатой передачи,
- зубчатой передачи, ![]() - подшипников качения,
- подшипников качения, ![]() - муфты.
- муфты.
Другие рефераты на тему «Производство и технологии»:
- Изучение металлургических свойств нового типа железорудного сырья (маггемитовых руд) для подготовки к доменной плавке
- Декоративное оформление детской одежды различных возрастных групп
- Котел пищеварочный электрический
- Автоматизация управления системой теплоснабжения
- Анализ эффективности работы двигателя внутреннего сгорания
Поиск рефератов
Последние рефераты раздела
- Технологическая революция в современном мире и социальные последствия
- Поверочная установка. Проблемы при разработке и эксплуатации
- Пружинные стали
- Процесс создания IDEFO-модели
- Получение биметаллических заготовок центробежным способом
- Получение и исследование биоактивных композиций на основе полиэтилена высокой плотности и крахмала
- Получение титана из руды