Беспроводные телекоммуникационные системы
Полная вероятность ошибки различения М сигналов с неизвестными параметрами равна
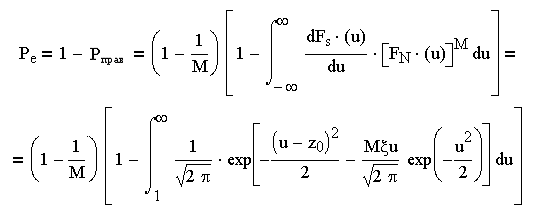
Из формул видно, что с увеличением числа различаемых сигналов вероятность ошибки принятия решения Pe(z0) увеличивается. С увеличением априорного интервала временных задержек сигналов ξ вероятность ошибки различения Pe(z0) значительно во
зрастает. [8]
4.4 Сравнение синхронных и асинхронных систем связи
Как правило, при рассмотрении производительности приемника или демодулятора предполагается наличие некоторого уровня синхронизации сигнала. Например, при когерентной фазовой демодуляции (схема PSK) предполагается, что приемник может генерировать опорные сигналы, фаза которых идентична (возможно, с точностью до постоянного смещения) фазе элементов сигнального алфавита передатчика. Затем в процессе принятия решения относительно значения принятого символа (по принципу максимального правдоподобия) опорные сигналы сравниваются с поступающими.
При генерации подобных опорных сигналов приемник должен быть синхронизирован с принимаемой несущей. Это означает, что фаза поступающей несущей и ее копии в приемнике должны согласовываться. Другими словами, если в поступающей несущей не закодирована информация, поступающая несущая и ее копия в приемнике будут проходить через нуль одновременно. Этот процесс называется фазовой автоподстройкой частоты (это – условие, которое следует удовлетворить максимально близко, если в приемнике мы хотим точно демодулировать когерентно модулированные сигналы). В результате фазовой автоподстройки частоты местный гетеродин приемника синхронизируется по частоте и фазе с принятым сигналом. Если сигнал-носитель информации модулирует непосредственно не несущую, а поднесущую, требуется определить как фазу несущей, так и фазу поднесущей. Если передатчик не выполняет фазовой синхронизации несущей и поднесущей (обычно так и бывает), от приемника потребуется генерация копии поднесущей, причем управление фазой копии поднесущей производится отдельно от управления фазой копии несущей. Это позволяет приемнику получать фазовую синхронизацию как по несущей, так и по поднесущей.
Кроме того, предполагается, что приемник точно знает, где начинается поступающий символ и где он заканчивается. Эта информация необходима, чтобы знать соответствующий промежуток интегрирования символа – интервал интегрирования энергии перед принятием решения относительно значения символа. Очевидно, если приемник интегрирует по интервалу несоответствующей длины или по интервалу, захватывающему два символа, способность к принятию точного решения будет снижаться.
Можно видеть, что символьную и фазовую синхронизации объединяет то, что обе включают создание в приемнике копии части преданного сигнала. Для фазовой синхронизации это будет точная копия несущей. Для символьной – это меандр с переходом через нуль одновременно с переходом поступающего сигнала между символами. Говорят, что приемник, способный сделать это, имеет символьную синхронизацию. Поскольку на один период передачи символа обычно приходится очень большое число периодов несущей, этот второй уровень синхронизации значительно грубее фазовой синхронизации и обычно выполняется с помощью другой схемы, отличной от используемой при фазовой синхронизации.
Во многих системах связи требуется еще более высокий уровень синхронизации, который обычно называется кадровой синхронизацией. Кадровая синхронизация требуется, когда информация поставляется блоками, или сообщениями, содержащими фиксированное число символов. Это происходит, например, при использовании блочного кода для реализации схемы прямой защиты от ошибок или если канал связи имеет временное разделение и используется несколькими пользователями (технология TDMA). При блочном кодировании декодер должен знать расположение границ между кодовыми словами, что необходимо для верного декодирования сообщения. При использовании канала с временным разделением нужно знать расположение границ между пользователями канала, что необходимо для верного направления информации. Подобно символьной синхронизации, кадровая равнозначна возможности генерации меандра на скорости передачи кадров с нулевыми переходами, совпадающими с переходами от одного кадра к другому.
Большинство систем цифровой связи, использующих когерентную модуляцию, требуют всех трех уровней синхронизации: фазовой, символьной и кадровой. Системы с некогерентной модуляцией обычно требуют только символьной и кадровой синхронизации; поскольку модуляция является некогерентной, точной синхронизации фазы не требуется. Кроме того, некогерентным системам необходима частотная синхронизация. Частотная синхронизация отличается от фазовой тем, что копия несущей, генерируемая приемником, может иметь произвольные сдвиги фазы от принятой несущей. Структуру приемника можно упростить, если не предъявлять требование относительно определения точного значения фазы поступающей несущей. К сожалению, это упрощение влечет за собой ухудшение зависимости достоверности передачи от отношения сигнал/шум.
До настоящего момента в центре обсуждения находилась принимающая часть канала связи. Однако иногда передатчик играет более активную роль в синхронизации – он изменяет отчет времени и частоту своих передач, чтобы соответствовать ожиданиям приемника. Примером того является спутниковая сеть связи, где множество наземных терминалов направляют сигналы на единственный спутниковый приемник. В большинстве подобных случаев передатчик для определения точности синхронизации использует обратный канал связи от приемника. Следовательно, для успеха синхронизации передатчика часто требуется двусторонняя связь или сеть. По этой причине синхронизация передатчика часто называется сетевой.
Необходимость синхронизации приемника связана с определенными затратами. Каждый дополнительный уровень синхронизации подразумевает большую стоимость системы. Наиболее очевидное вложение денег – необходимость в дополнительном программном или аппаратном обеспечении для приемника, обеспечивающего получение и поддержание синхронизации. Кроме того, что менее очевидно, иногда мы платим временем, затраченным на синхронизацию до начала связи, или энергией, необходимой для передачи сигналов, которые будут использоваться в приемнике для получения и поддержания синхронизации. В данном случае может возникнуть вопрос, почему разработчик системы связи вообще должен рассматривать проект системы, требующий высокой степени синхронизации. Ответ: улучшенная производительность и универсальность.
Рассмотрим обычное коммерческое аналоговое АМ-радио, которое может быть важной частью системы широковещательной связи, включающей центральный передатчик и множество приемников. Данная система связи не синхронизирована. В то же время полоса пропускания приемника должна быть достаточно широкой, чтобы включать не только информационный сигнал, но и любые флуктуации несущей, возникающие вследствие эффекта Доплера или дрейфа опорной частоты передатчика. Это требование к полосе пропускания передатчика означает, что на детектор поступает дополнительная энергия шума, превышающая энергию, которая теоретически требуется для передачи информации. Несколько более сложные приемники, содержащие систему слежения за частотой несущей, могут включать узкий полосовой фильтр, центрированный на несущей, что позволит значительно снизить шумовую энергию и увеличить принятое отношение сигнал/шум. Следовательно, хотя обычные радиоприемники вполне подходят для приема сигналов от больших передатчиков на расстоянии несколько десятков километров, они могут оказаться недееспособными при менее качественных условиях.
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем