Механизмы государственного регулирования общественного транспорта
Рис. 5.8 Блок-схема механизма совершенствования обеспечения безопасности АТС в эксплуатации
Новая методология ОБ ДД, основанная на совершенствовании ОБ АТСЭ, предусматривает на основе анализа ДТП и исследований надёжности систем АБ АТС определение пределов изменения их параметров в процессе эксплуатации. На основании этих исследований возможна разработка поэлементной диагностики и стендовых
комплексов оценки систем АБ АТС, а в конечном итоге, уточнение нормативов их технического состояния в условиях эксплуатации. Взаимодействие предприятий автосервиса, страховых и надзорных органов на основании этой информации будет способствовать снижению показателей аварийности на АТ.
5.3 Активная безопасность автотранспортных средств
Активная безопасность (АБ) комплекса ЧАДС (человек – автомобиль – дорога – среда движения) в настоящее время имеет приоритетное значение при анализе безопасности дорожного движения (БДД) вообще. Зарубежные и отечественные исследования [14] в области увеличения эффективности системы обеспечения АБ находятся в настоящее время на подъеме, а активно разрабатываемый в странах с развитой автомобильной промышленной индустрией комплексный подход задаёт новые направления её дальнейшего развития.
Для того чтобы аргументированно отметить некоторые современные направления и тенденции в области повышения АБ, обратимся к истории возникновения понятия АБ и воспользуемся анализом работ зарубежных авторов, выполненным под руководством автора аспирантом В.В. Карповым [76]. Рассмотрим два различных подхода к анализу проблемы обеспечения БДД и на их основе выделим основные возможности в повышении системы АБ, которые позволяют значительно увеличить БДД.
Классическое определение БДД было предложено Wilfert в 1966 г. (рис. 5.9). Он впервые предложил разделить безопасность транспортных средств (ТС) на активную и пассивную. Новым было выделение в составе АБ четырёх категорий: безопасность вождения, безопасность среды вождения, перцепционная безопасность и безопасное управление. И несмотря на достаточно непривычные классификационные пункты (в обычной классификации – тормозные и тягово-скоростные свойства, управляемость, устойчивость, информативность автомобиля) в данной схеме отчётливо усматриваются близкие взаимодействия между дорогой, ТС и водителем, т.к. уже в то время в полной мере ощущалась необходимость комплексного подхода. Однако основная фокусировка внимания направлялась всё же на обеспечение непосредственно АБ ТС.
Активная безопасность автомобиля в настоящее время (и, вероятнее всего, ещё довольно долго) будет лишь лимитирующим фактором, но не главным в обеспечении БДД. Подобная расстановка приоритетов являлась следствием первичной и исключительной ответственности водителя за безопасность процесса вождения. Таким образом, для учёных и инженеров-автомобилистов долгое время ещё будет существовать только одна установка: сделать всё возможное, чтобы обеспечить максимальные возможности для водителя в его проблеме безопасного вождения.
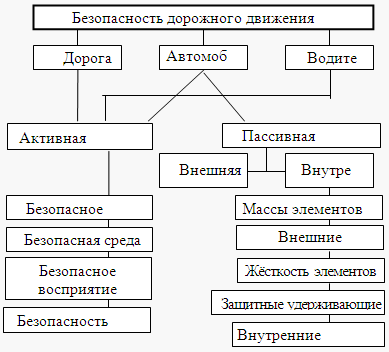
Рис. 5.9 Классификация БДД (Wilfert)
Несмотря на высокие темпы развития информационно-вычислительной технологии, которая могла бы выполнять функции по управлению ТС с гораздо большей надёжностью, чем человек, подобное невозможно в современном обществе. Это обусловлено, прежде всего, моральным конфликтом возможности передачи ответственности за свою жизнь и жизнь окружающих людей искусственному интеллекту. В авиационной или ядерной отраслях рассматриваемый шаг был уже давно сделан и является весьма успешным, однако это происходит ввиду того, что эти отрасли обслуживаются очень немногочисленным и высокопрофессиональным сообществом. Когда же мы говорим о дорожном движении, то необходимо учитывать, что в данный процесс будет вовлечён практически каждый человек. Поэтому, чтобы иметь лучшее представление о характере взаимодействий в подсистеме «водитель-автомобиль» и их причинной обусловленности, обратимся к трёхуровневой структуре системы поведения человека при управлении ТС, впервые предложенной Rasmussen (рис. 5.10).
Поскольку вождение относится к направленно-ориентированной сенсомоторной деятельности человека, то Rasmussen подразделяет её на три поведенческие категории: поведение, основанное на знании; поведение, обусловленное некоторыми правилами; и поведение, опирающееся на имеющиеся навыки. На первом уровне водитель вынужден анализировать различные поведенческие альтернативы, выбирая из них наиболее, на его взгляд, подходящие.
Основное время занимает умственный процесс обработки имеющихся опытных или теоретических знаний, а после этого выбранный вариант переносится на действия посредством моторных реакций. Второй уровень отличен тем, что на нём водитель уже обладает набором некоторых правил поведения в данной дорожной ситуации, т.к. подобные ситуативно-ассоциативные условия уже довольно часто происходили ранее. Поведение человека на третьем уровне характеризуется рефлекторными, ответными на определённые стимулирующие воздействия реакциями. Очевидно, что третий уровень является наиболее эффективной формой поведения человека в условиях ограниченного времени.
Совершенно ясно, что основными направлениями работы по улучшению безопасности движения являются, если говорить в терминологии описываемого подхода, минимизация ситуаций, вызывающих первый поведенческий уровень, оптимизация второго уровня решения задачи управления ТС и обеспечение максимальной эффективности и надёжности стабилизирующего воздействия со стороны водителя на третьем уровне. Решение первой из указанных задач лежит в области повышения квалификации водителей, а также разработки различных навигационных систем, помогающих выбрать наилучший маршрут движения.
Оптимизация управленческого уровня задачи вождения имеет огромное значение для безопасности движения. На данном уровне человек наделён чрезвычайно важной способностью упреждающе интерпретировать развитие дорожной ситуации, т.е. заранее выбирать необходимые параметры движения, чтобы компенсировать время запаздывания, заранее присущее описываемой системе. Основные направления приложения усилий видятся в разработке систем информационного обеспечения водителя, систем предупреждения от различного рода опасностей, а также рекомендаций необходимых действий в сложившейся ситуации. На уровне стабилизации водитель как субъект управления и ТС как объект составляют хорошо известную и тесно связанную динамическую систему. Важная задача развития этого блока состоит в том, чтобы избежать любого сбоя (непредсказуемых изменений динамики ТС) во взаимодействии между водителем и ТС.
 |
Другие рефераты на тему «Транспорт»:
- Расчет параметров рабочего процесса и выбор элементтов конструкции тепловозного двигателя
- Проектирование участка улицы
- Транспортные характеристики грузов
- Расчет экономической эффективности внедрения новой техники и передовых методов обслуживания
- Разработка участка уборочно-моечных работ на станции технического обслуживания
Поиск рефератов
Последние рефераты раздела
- Проект пассажирского вагонного депо с разработкой контрольного пункта автосцепки
- Проектирование автомобильных дорог
- Проектирование автотранспортного предприятия МАЗ
- Производственно-техническая база предприятий автомобильного транспорта
- Расчет подъемного механизма самосвала
- Системы автоблокировки
- Совершенствование организации движения и снижение аварийности общественного транспорта в городе Витебск