Разработка стенда для вывешивания и сдвига рельсошпальной решетки
Также, от расположения ПРУ зависит точность постановки решетки при входе машины в кривую и при выходе из нее.
На балластировочных машинах, вследствие большой загрузки балластом передней части решетки, напряжения в рельсах выше, чем в той части, которая находится за захватом. Поэтому путеподъемное устройство целесообразно располагать не по центру свободного пролета, а со смещением к задней т
ележке. Соотношение расстояний между передней тележкой и захватом l1 и между захватом и задней тележкой l2 рекомендуется принимать l1 : l2 = 1 : 0,83.
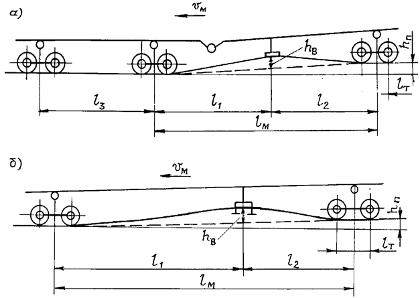
Рисунок 2 – Схема расположения ПРУ в пролетах машин
а – двухпролетный балластер; б – выправочно-подбивочно-рихтовочная машина
Путеподъемные устройства работают с опиранием на ферму машины или на балластную призму (рисунок 3).
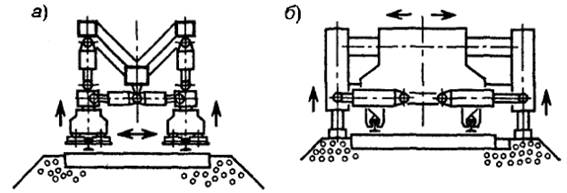
Рисунок 3 – Виды опор ПРУ
а - ПРУ с опорой на ферму машины; б – ПРУ с опорой на балластную призму
На машинах применяют маятниковые (рисунок 4) и консольные подвески (рисунок 5) рельсовых захватов с электромеханическим и гидравлическим приводами.
При электромеханическом приводе в многочисленных соединениях элементов устройства появляются износовые зазоры. Кроме того, для предотвращения заклинивания подвески захватов при переносе решетки предусмотрены технологические зазоры между контактными роликами механизма сдвига и вертикальной тягой. В электромагнитных рельсовых захватах имеется зазор между ребордой опорно-рихтующего ролика и головкой рельса.
Высокая инерционность системы и наличие многочисленных зазоров снижают точность постановки решетки в требуемое положение и вызывают необходимость снижения рабочей скорости машины.
С целью повышения быстродействия системы на выправочно-подбивочных машинах непрерывного действия используют реверс-редукторы с электромагнитными муфтами. В электромагнитных захватах применяют специальные рихтующие ролики. Применение гидропривода повысило эффективность работы выправочных и путеподъемных устройств.
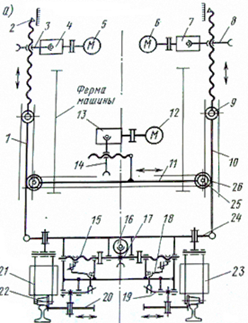
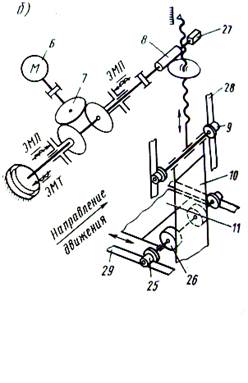
Рисунок 4 – Кинематическая схема ПРУ ВПО-3000
1, 10 – параллелограммная подвеска; 2 – указатель; 3, 8, 14 – червячный редуктор подъема и сдвига; 4, 7, 13 – реверс-редуктор; 5, 6, 12, 16 – электродвигатель; 9, 25 – ходовой ролик; 11 – каретка; 15 – ходовой винт; 17 – червячный редуктор рихтующих роликов; 18 – двуплечий рычаг; 19, 28, 29 – направляющая; 20 – рихтующий ролик; 21, 23 – электромагнит; 22 – опорный ролик; 24 – поперечная балка; 26 – упорный каток; 27 – квадрат; ЭМП, ЭМЛ, ЭМТ – электромагнитные муфты реверса и тормозов
Используемые на машинах маятниковые и консольные подвески рельсовых захватов имеют и другие недостатки. Так, при маятниковой подвеске (по типу ВПО-3000) изображенной на рисунке 4, механизм сдвига решетки расположен по высоте на значительном расстоянии от рельсового захвата. Это увеличивает время выбора зазоров и мощность на сдвиг и вывешивание решетки. Более удачной является подвеска на машине ВПО-3-3000, кинематическая схема которой приведена на рисунке 6. Консольная подвеска захватов по типу ВПР-1200 работает эффективно лишь при малых величинах вывешивания и сдвига решетки (30 .50 мм).
Важным узлом в путеподъемных и выправочных устройствах является рельсовый захват. На машинах применяют в основном электромагнитные (рисунок 7) и роликовые (рисунок 8) захваты. От надежности захвата и удержания решетки в процессе работы существенно зависит производительность и точность постановки решетки в требуемое положение. При сбросе захватом решетки требуется дополнительное время на перезарядку рабочих органов и устранение перекосов решетки. В результате снижаются производительность и точность постановки решетки.
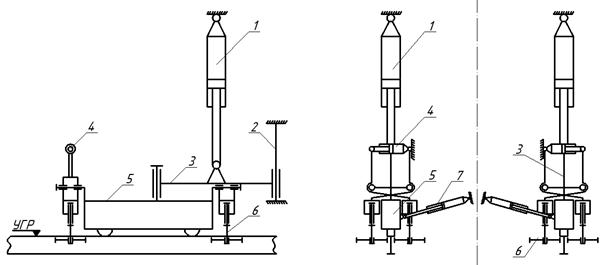
Рисунок 5 – Кинематическая схема ПРУ ВПР-02
1 – гидроцилиндр подъема пути; 2 – вертикальная направляющая; 3 – кронштейн; 4 – гидроцилиндр привода захватов; 5 – балансир; 6 – захватные ролики; 7 – рихтующий гидроцилиндр
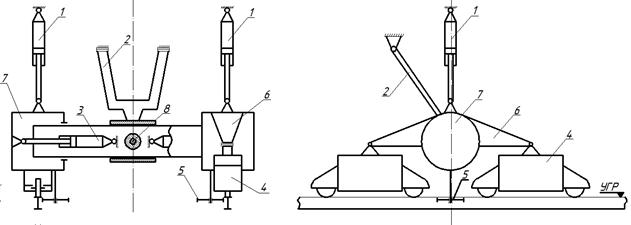
Рисунок 6 – Кинематическая схема ПРУ ВПО-3-3000
1 – гидроцилиндр подъема пути; 2 – реактивный кронштейн; 3 – гидроцилиндр сдвига пути; 4 – электромагнитные роликовые захваты; 5 – рихтующие ролики; 6 – траверса; 7 – центральная балка; 8 - шарнирный узел крепления центральной балки и реактивного кронштейна
Сброс решетки электромагнитным захватом происходит по нескольким причинам. На пути с асбестовым балластом происходит налипание металлических включений к магниту. Электромагнитное поле рассеивается, подъемная сила захвата уменьшается. Необходима очистка пространства в зоне рельса от балласта.
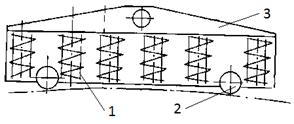
Рисунок 7 – Электромагнитный рельсовый захват
1 – электромагнитная катушка; 2 – опорный ролик; 3 – корпус электромагнита
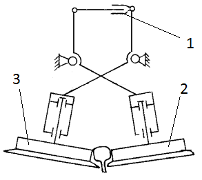
Рисунок 8 – Роликовый рельсовый захват
1 – гидроцилиндр привода захвата; 2 – рихтующий ролик; 3 – захватный ролик
Одной из причин сброса решетки является также неравномерность нагрузок на катушки по длине захвата. При изгибе решетки наибольший ее прогиб смещается в сторону более длинного свободного пролета и практически может находиться вне рельсового захвата. В результате задние катушки нагружаются больше, чем передние и это способствует отрыву от рельса всего магнита. Отрыву захвата способствует также неравномерность зазоров по его длине между нижней пластиной магнита и головкой рельса. По концам захвата они больше, чем в середине. Выравнивание нагрузок на катушки и равномерность зазоров можно обеспечить использованием секционных рельсовых захватов небольшой длины. При односекционном захвате эти недостатки можно устранить применением одноконсольного захвата. Консоль у захвата должна быть только с задней стороны.
Отрыв захвата от рельса происходит также вследствие неудачной конструкции подвески корпуса захвата к поперечной балке. Усилие на перемещение захвата вдоль рельса передается в верхней части его корпуса. При увеличении сопротивления перемещению захвата (особенно на стыках) создается дополнительный момент, разворачивающий магнит в вертикальной плоскости относительно переднего ролика. Это способствует отрыву захвата от рельса. Указанный недостаток можно устранить присоединением подвески к нижней части его корпуса. При такой конструкции существенно уменьшается момент, разворачивающий магнит. С этой же целью можно использовать захват с несимметричным расположением катушек относительно его подвески. Повышает надежность работы электромагнитного захвата также использование дублирующих рельсозахватных роликов.
Другие рефераты на тему «Транспорт»:
Поиск рефератов
Последние рефераты раздела
- Проект пассажирского вагонного депо с разработкой контрольного пункта автосцепки
- Проектирование автомобильных дорог
- Проектирование автотранспортного предприятия МАЗ
- Производственно-техническая база предприятий автомобильного транспорта
- Расчет подъемного механизма самосвала
- Системы автоблокировки
- Совершенствование организации движения и снижение аварийности общественного транспорта в городе Витебск