Теория автоматического управления судовой аппаратуры
Основной задачей АСР является поддержание заданных значений регулируемых параметров ОР в статических и динамических режимах работы с отклонениями, не превышающими норм, предписанных правилами технической эксплуатации и Регистра СССР.
Из структурных схем видно, что АСР – это замкнутые системы, состоящие из ряда последовательно соединенных элементов, выходной сигнал каждого из которых являе
тся входным сигналом последующего. Так, выходной сигнал ОР – значение регулируемого параметра х – является входным сигналом измерителя и т. д. В конечном счете выходной сигнал ИО является входным сигналом ОР, определяющим количество рабочего тела, подводимого к объекту в единицу времени. А как следует из условия установившегося режима, при равенстве подвода и отвода объекта
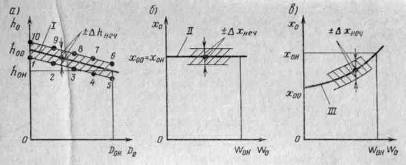
Рис. 1. Статические характеристики АСР:
а – с положительной неравномерностью; б – с нулевой неравномерностью;
в-с отрицательной неравномерностью
регулируемый параметр имеет определенное неизменное значение, т. е. если W01 = W02, то x0 = idem. Однако установившихся режимов для каждой системы в диапазоне нагрузок от нулевого значения W01 = W02 = 0 до максимального W01= W02 = Womax существует бесконечное множество и каждому значению нагрузки может соответствовать свое значение регулируемого параметра xo при неизменной настройке регулятора (задании R).
Таким образом, для любой АСР при установившихся режимах входными величинами являются значения нагрузки Wo и задание R, определяемое настройкой регулятора, а выходными – значения регулируемого параметра xо. Зависимость установившихся значений регулируемого параметра от нагрузки при неизменной настройке регулятора описывается статической характеристикой АСР. Статические характеристики АСР (рис. 1) строятся расчетным путем по уравнениям статики, а в условиях эксплуатации – по значениям параметров, определяемых с помощью КИП. Различные АСР поддерживают заданные значения регулируемых параметров в зависимости от нагрузки с различной статической точностью. Неточность поддержания установившихся значений регулируемых параметров оценивается статической неравномерностью и нечувствительностью АСР.
Для примера по опытным данным построим статическую характеристику АСР уровня воды в барабане котла. Регулируемым параметром рассматриваемой АСР является уровень воды h в барабане котла, а нагрузкой – расход пара Dn. He меняя настройки регулятора, определим установившиеся значения уровня при различных значениях нагрузки. Нагрузку будем изменять плавно от нулевого значения до номинального и обратно, фиксируя значения уровня через каждые 25% от Dон.
При нулевой нагрузке (Dоп = Dопв = 0) клапаны l и т закрыты, а в барабане устанавливается уровень, значение которого на графике (рис. 1, а) соответствует ординате точки /. Приоткрытие клапана 1 на величину, соответствующую 25% от Dон приведет к нарушению равновесия и снижению уровня. Поплавковый регулятор будет увеличивать открытие клапана m до тех пор, пока не наступит массовое равенство между новым расходом пара и питательной воды при установившемся значении уровня. Эти новый значения параметров определят координаты точки 2. С дальнейшим увеличением нагрузки до номинального значения Doн по аналогии определятся координаты точек 3, 4 и 5.
При уменьшении нагрузки движение клапана m в обратном направлении начнется после того, как будут выбраны зазоры в звеньях системы и преодолены силы сухого трения штока клапана в сальнике. Эти силы преодолеваются за счет выталкивающей силы поплавка при повышении уровня до значения, определяющего ординату точки 6. С дальнейшим уменьшением нагрузки определяются координаты точек 7, 8, 9 и 10.
Соединив полученные точки, построим статическую характеристику АСР в виде зоны нечувствительности. Нечувствительность ±xнеч определяется половиной ширины зоны, взятой по оси регулируемого параметра.
Нечувствительность АСР – это изменение регулируемого параметра ±xнеч на которое система не реагирует из-за зазоров и сил сухого трения в ее звеньях.
Для идеальной АСР, в звеньях которой отсутствуют силы сухого трения и зазоры, статическая характеристика примет вид линии I, проходящей посредине зоны нечувствительности. Тогда, как следует из графика (рис. 1, а), идеальная АСР будет поддерживать заданный уровень hoo при нулевой нагрузке, а при номинальной уровень снизится до величины hoн. Разность этих значений уровня определяет величину статической неравномерности АСР, т. е. xнер = hoo – hoн Чем больше неравномерность, тем больше наклон статической характеристики.
В дальнейшем под неравномерностью АСР будем понимать разность установившихся значений регулируемого параметра, взятых при нулевой и номинальной нагрузках при условии неизменной настройки регулятора. В зависимости от свойств регулятора и места установки ИО на ОР неравномерность АСР может быть различной по значению и знаку.
На рис. 1 представлены статические характеристики АСР, для первой из которых неравномерность положительная, для второй – нулевая, а для третьей – отрицательная. Неравномерность измеряется в тех же единицах, что и регулируемый параметр. Если значение неравномерности равно нулю, система считается астатической, а если отличается от нуля – статической.
Статическая характеристика АСР может быть линейной (рис. 1, а и б) либо иметь кривизну (рис. 1, в). Вид характеристики зависит от свойств самого регулятора, характеристик ИО и ОР.
Вопросы устойчивости, характеризующейся динамическими свойствами АСР, являются основными при изучении теории и эксплуатации средств автоматического регулирования.
Определение температуры является одним из сложных и трудоемких процессов измерения, основанным на теплообмене между телами. Приборы, входящие в тепловой контакт с контролируемой средой, по показаниям которых определяется ее температура, называются термометрами, а устройства, предназначенные для регулирования температуры, – терморегуляторами. Неотъемлемой составной частью термометров и измерителей терморегуляторов являются ЧЭ, физические свойства которых изменяются при нагреве. Измерители разделяют на механические и электрические.
К механическим относятся измерители, действие которых основано на тепловом расширении жидких или твердых тел либо на изменении давления газов или паров жидкости в замкнутых системах. Выходными сигналами таких измерителей являются перемещения либо усилия, однозначно определяемые изменением температуры.
Работа жидкостных измерителей температуры основана на неодинаковом расширении при нагреве оболочки и находящейся в ней жидкости. Примером таких измерителей являются стеклянные термометры, состоящие из баллончика с припаянной к нему прозрачной капиллярной трубкой (капилляром) и шкалы. Для заполнения баллончика выбирается жидкость, коэффициент расширения которой в 15–30 раз больше, чем у оболочки. Поэтому приращение температуры вызывает увеличение объема жидкости и ее вытеснение из оболочки в капилляр, в котором положение кромки жидкости по шкале определяет значение температуры. Оболочку и капиллярные трубки изготавливают из стекла или кварца. Наполнителями могут быть жидкости (спирт, толуол или пентан) либо текучие металлы (ртуть или галлий).
Другие рефераты на тему «Транспорт»:
Поиск рефератов
Последние рефераты раздела
- Проект пассажирского вагонного депо с разработкой контрольного пункта автосцепки
- Проектирование автомобильных дорог
- Проектирование автотранспортного предприятия МАЗ
- Производственно-техническая база предприятий автомобильного транспорта
- Расчет подъемного механизма самосвала
- Системы автоблокировки
- Совершенствование организации движения и снижение аварийности общественного транспорта в городе Витебск