Основные приборы и механизмы тягового электровоза
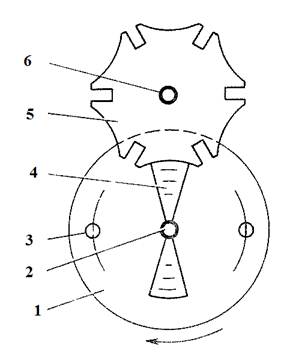
Рис.6. Устройство передачи с мальтийским крестом
Следовательно, необходимо, чтобы кулачковый вал вращался неравномерно при равномерном вращении приводного двигателя. Это и обеспечивает специальный редуктор, в котором передача выполнена с использованием так называемого мальтийского креста. На ведущем валу 2 (рис. 6) поса
жен диск 1 с двумя поводками — цевками 3 и фиксаторами 4 положения мальтийского креста 5, посаженного на ведомом валу 6. В начале вращения ведущего вала, пока поводок не вошел в прорезь мальтийского креста, ведомый вал остается неподвижным, его положение фиксируется специальным профилем креста и фиксатором. Далее поводок, войдя в прорезь — «зацепившись», будет поворачивать мальтийский крест, причем с неравномерной скоростью. Наибольшая частота вращения ведомого вала при равномерном вращении ведущего будет, когда поводок приблизится к ведомому валу, т. е. когда займет верхнее положение.
Рассмотрим кинематическую схему привода (рис. 7). От двигателя 18 вращение через шестерню ручного привода с рукояткой 17 и предельную муфту 1 передается червяку 16, а затем валу червячного колеса, который вращается равномерно, но со скоростью, в 10 раз меньшей, чем двигатель. От вала червячного колеса движение передается кулачковым валам 12 (дугогасящие контакторы), 11 (контакторы без дугогашения переключателя и ступеней) и 9 (контакторы без дугогашения переключателя обмоток). Цевка поводка 3, поворачиваясь, входит в паз креста 4, поворачивает его и через зубчатую передачу с передаточным отношением i=1:2 приводит во вращение вал 12. Одновременно от вала червячного колеса через зубчатую передачу с i=1:1,5 вращение передается полому валу 5, на который насажен одноцевочный поводок 6. Далее через мальтийский крест 7, зубчатую передачу с i=3:10 вращение передается кулачковому валу 11 и от него через зубчатую передачу 10 валу 9. Концевой упор 8 позволяет вращаться валу 9 в пределах 342°, что соответствует возможности вращения вала 11 в пределах 342°х2=684° (зубчатая передача с i= 1:2).
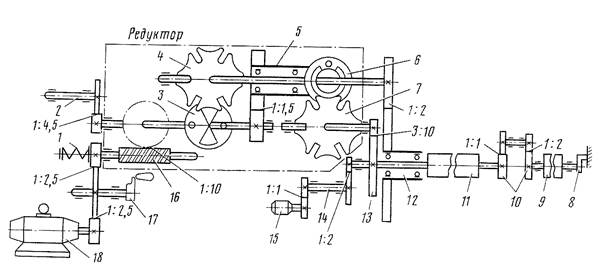
Рис.7. Кинематическая схема привода ЭКГ-8
Переход с одной позиции на другую совершается за 15 оборотов шестерни двигателя, или за 1,5 оборота червячного колеса. Переход условно можно разбить на три этапа. Первый этап: поворот червячного колеса на пол-оборота (на 180°), одновременно двухцевочный поводок 3 поворачивается на 180°, крест 4 на 60°, вал 12 на 30°, полый вал 5 и одноцевочный поводок 6 на 180°: 1,5=120°. Поскольку цевка поводка 6 не дошла до креста 7, то крест 7, шестерня 13, валы 11 и 9 остаются неподвижными. Второй этап: червячное колесо поворачивается еще на 180°, одновременно вал 12 поворачивается на 30°, и теперь уже цевка поводка 6, проходя дугу в 120°, поворачивает крест 7 на 60°, вал 11 на 18° и вал 9 на 9°. Третий этап: червячное колесо поворачивается еще на 180°, вал 12 - еще на 30°, а валы 11 и 9 остаются неподвижными. Во время первого этапа отключается один из четырех контакторов с дугогашением, во время второго один из контакторов без дугогашения размыкается, а другой затем замыкается.
Во время третьего этапа замыкается тот контактор с дугогашением, который вначале разомкнулся.
От вала червячного колеса через зубчатую передачу 1:4,5 получает вращение кулачковый вал 2 блок-контактов. Сельсин-датчик 15 через зубчатые передачи связан с валом 11. На промежуточном валу 14 установлен указатель позиций. Второй указатель позиций находится на выходном конце вала 9.
Для того чтобы в зимнее время масло в редукторе не застывало и не создавало большого сопротивления, редуктор снабжен электрическим нагревателем мощностью 130 Вт, напряжением 50 В.
Групповой контроллер имеет многочисленные блок-контакты, объединенные в две различные группы. Первая состоит из 14 блок-контактов и приводится в действие валом, связанным с валом червячного колеса привода. Вторая состоит из 17 блок-контактов и приводится в действие кулачковым валом, связанным с кулачковым валом силовых контакторных элементов без дугогашения. Диаграммы замыканий и размыканий блок-контактов контроллера на различных электровозах различны.
Переход с одной ступени на другую состоит из четырех операций, выполняемых последовательно одна за другой после кратковременных пауз: отключение контакторного элемента с дугогашением, отключение одного контакторногоэлемента без дугогашения, включение другого контакторного элемента без дугогашения и включение контакторного элемента с дугогашением, который отключился первым. Например, при переходе с 25-й на 26-ю позицию (рис. 8) сначала размыкается контакторный элемент Б, а затем элемент 23, далее замыкается элемент 24 и после этого контакторный элемент Б. Отличие 26-й позиции от 25-й заключается только в том, что на 26-й включен контакторный элемент 24, а на 25-й — 23. Оба контакторных элемента 23 и 24 (без дугогашения) производят операции в обесточенных цепях, для чего предварительно контакторный элемент Б кратковременно, только на время перехода, размыкает эти цепи. Все контакторные элементы с дугогашением А, Б, В и Г на всех позициях замкнуты и лишь кратковременно на время для переключения в «своих» цепях контакторами без дугогашения поочередно размыкаются.
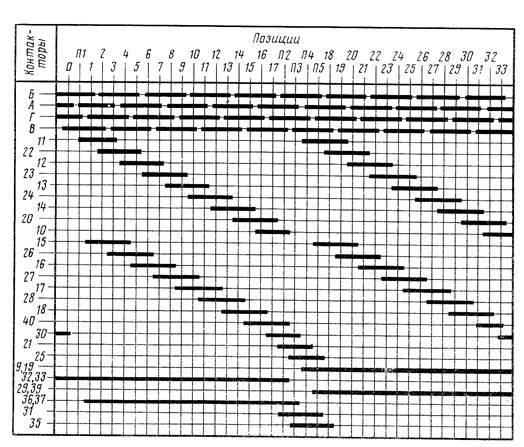
Рис.8. Диаграмма замыканий и размыканий контакторных элементов ЭКГ-8
![]()
![]()
![]() Главный контроллер ЭКГ-8 имеет 33 фиксированные позиции, набор которых осуществляется (при напряжении 50 В) меньше чем за 0,5 мин. Контакторные элементы изолированы относительно корпуса на напряжение 3100 В, рассчитаны на ток 1300 А и на напряжение 260 (с дугогашением) и 1100 В (без дугогашения); они имеют раствор контактов 20—26 (разрывные контакты) и 22—30 мм (главные контакты). Блокировочные контакты рассчитаны на ток 30 А и напряжение 50 В.
Главный контроллер ЭКГ-8 имеет 33 фиксированные позиции, набор которых осуществляется (при напряжении 50 В) меньше чем за 0,5 мин. Контакторные элементы изолированы относительно корпуса на напряжение 3100 В, рассчитаны на ток 1300 А и на напряжение 260 (с дугогашением) и 1100 В (без дугогашения); они имеют раствор контактов 20—26 (разрывные контакты) и 22—30 мм (главные контакты). Блокировочные контакты рассчитаны на ток 30 А и напряжение 50 В.
Вывод:
Исследовали многопозиционный групповой переключатель ЭКГ-8, его назначение, устройство и принцип работы.
Цель работы:
Исследовать устройство и принцип действия контроллера машиниста КМЭ-70
Порядок работы:
1. Назначение
2. Устройство
3. Принцип действия
4. Рисунок
5. Вывод
Назначение:
В процессе ведения поезда электровоз работает и в режиме тяги, и в режиме торможения, и на выбеге. Сила тяги и сила торможения может регулироваться вручную либо автоматически по заданным параметрам. Аппараты, используемые для регулирования работы преобразовательных установок и тяговых двигателей - блоки управления, переключатели ступеней, реверсор, контакторы, переключатели и др. имеют дистанционное управление. Цепи управления выведены в кабину машиниста к пульту и в основном к контроллеру машиниста. Контроллер машиниста предназначен для управления аппаратами силовой цепи в режиме тяги и электрического торможения. Машинист с помощью контроллера устанавливает направление движения, увеличивает силу тяги, осуществляя набор позиций, или уменьшает силу тяги, производя сброс позиций (причем он может это делать опять же с помощью контроллера, либо по одной позиции, либо автоматически до любой выбранной им позиции), а на электровозах с электрическим торможением задает режим торможения для остановки поезда или для поддержания определенной скорости.
Другие рефераты на тему «Транспорт»:
Поиск рефератов
Последние рефераты раздела
- Проект пассажирского вагонного депо с разработкой контрольного пункта автосцепки
- Проектирование автомобильных дорог
- Проектирование автотранспортного предприятия МАЗ
- Производственно-техническая база предприятий автомобильного транспорта
- Расчет подъемного механизма самосвала
- Системы автоблокировки
- Совершенствование организации движения и снижение аварийности общественного транспорта в городе Витебск