Определение оптимального режима работы машины и указание рекомендуемый диапазон технологических и конструктивных параметров многоковшового роторного траншейного экскаватора
Содержание
Введение
1. Конструкция, принцип действия оборудования и его назначение
2. Расчет основных деталей и узлов
3. Расчёт основных технико-экономических показателей
4. Тестовый пример расчёта мощности и производительности
5. Методы, применяемые для определения оптимального режима работы
5.1 Определение максимума значения функции с помощью метода "золотог
о сечения"
5.2 Определение минимума значения функции с помощью метода Фибоначчи
6. Выводы и рекомендации
7. Список литературы
8. Приложение
Введение
Целью курсовой работы является определение оптимального режима работы машины или агрегата. В соответствии с поставленной целью нужно решить следующие задачи:
- Осуществить расчёт деталей, узлов и технико-экономических показателей оборудования (производительность и мощность).
- Выделить основные параметры, влияющие на работу данного оборудования .
- Определить максимальное значение производительности и минимальное значение потребляемой мощности.
- Указать рекомендуемые режимы работы описываемого оборудования.
1. Конструкция, принцип действия оборудования и его назначение
Многоковшовый экскаватор — землеройная машина с рабочим органом в виде ковшовой цепи или ковшового колеса, которому сообщаются движения и усилия, достаточные для отделения от массива, захвата и переноса грунта.
Главная особенность этих машин заключается в непрерывности рабочего процесса. Он осуществляется при совмещении двух или трех одновременных и непрерывных рабочих движений (вращательного или поступательного движения рабочего органа относительно машины и поступательного движения самой машины)
Основное назначение этих экскаваторов в строительстве — отрывка траншей и щелей под трубопроводы и линии связи, производство гидротехнических и мелиоративных земляных работ.
Преимущества многоковшовых экскаваторов по сравнению с одноковшовыми заключаются в их более высокой удельной производительности и меньшей стоимости производства работ. В нашей стране ими выполняют до 20% общего объема земляных работ. Однако многоковшовые уступают одноковшовым экскаваторам при работе в тяжелых грунтах, особенно при разработке грунтов с каменными включениями.
Роторный экскаватор — самоходная выемочно-погрузочная машина непрерывного действия на гусеничном или шагающе-рельсовом ходовом оборудовании с выдвижной или невыдвижной стрелой, выбирающая горную породу ковшами, укреплёнными на роторном колесе.
Характеристики роторных экскаваторов
§ диаметр роторных колёс — до 18м
§ вместимость ковша — до 12500л
§ производительность — более 10000м3/ч
§ высота разработки — до 50м
§ глубина копания — до 25м
Применение роторных экскаваторов
§ вскрышные и добычные работы верхним или нижним черпанием
§ удаления породы в отвал
§ селективная выемка маломощных пластов и разносортных пропластков полезного ископаемого
§ рытьё каналов и траншей
§ погрузка горной породы
§ транспортировка вскрышных пород и полезных ископаемых
§ складирование материалов
Рабочие инструменты роторных экскаваторов
§ ротор с приводом
§ стрела ротора с конвейером
§ кабина управления
§ надстройка
§ отвальная стрела с конвейером
§ поворотная платформа с приводом поворота экскаватора
§ опорно-поворотное устройства
§ ходового оборудования
Классификация роторных экскаваторов
§ вскрышные роторные экскаваторы
§ добычные роторные экскаваторы
Роторный траншейный экскаватор — землеройная машина с рабочим органом в виде ковшового колеса (ротора), вращающегося в плоскости, совпадающей с направлением рабочего перемещения всей машины или незначительно отклоняющейся от нее. Грунт, отделяемый от массива и захватываемый ковшами, поднимается в зону разгрузки, которая находится в верхней части ротора, перемещается в сторону от траншеи и укладывается в отвал ленточным конвейером или метателем.
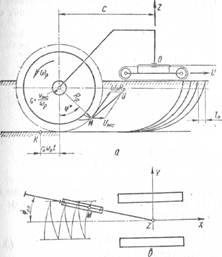
По сравнению с цепными роторные траншейные экскаваторы отличаются более высоким КПД (нет цепей, работающих в абразивной среде) и, следовательно, меньшей энергоемкостью разработки грунта. При равной с цепным экскаватором массе роторный экскаватор производительнее, поскольку допускает более высокую скорость резания, обусловленную равномерностью вращения ротора, жестким креплением ковшей и лучшими условиями их опорожнения. Однако роторным рабочим органом можно отрывать траншеи не уже 0,15 .0,2 м, тогда как цепным ширина траншеи (щели) может быть доведена до 0,05 м. Пределы глубины отрываемых траншей роторными экскаваторами несколько меньше, чем цепными.
Глубина отрываемых траншей определяется диаметром ротора. Увеличение глубины копания связано со значительным возрастанием диаметра и массы ротора и поэтому рациональный предел глубины копания для ЭТР не превышает 3 м. Передача энергии от дизеля тягача к основным исполнительным механизмам (роторному колесу, отвальному конвейеру, гусеничному движителю) и вспомогательному оборудованию (механизмам подъема рабочего органа и конвейера) осуществляется с помощью механической, гидравлической или электромеханической трансмиссии.
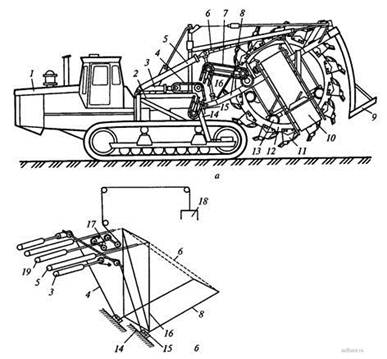
В трансмиссию тягача включен гидромеханический ходоуменьшитель для бесступенчатого регулирования рабочих скоростей движения машины при копании траншей. На тягаче установлена дополнительная рама 2 с размещенными на ней механизмами привода 7и подъема-опускания рабочего органа. Рама имеет две наклонные направляющие 14, по которым с помощью пары гидроцилиндров 3 и двух пластинчатых цепей 4 гидравлического подъемного механизма перемещаются ползуны 15 переднего конца рамы 8 рабочего органа при переводе его из транспортного положения в рабочее и наоборот. Подъем-опускание задней части рабочего органа (рис. 1, б) осуществляются парой гидроцилиндров 5, штоки которых шарнирно прикреплены к верхней части стоек 16, связанных с задним концом рамы 8 цепями 6. При копании траншеи задняя часть рабочего органа находится в подвешенном состоянии Установка откидной части ленточного конвейера в наклонное рабочее положение и опускание ее при транспортировке машины производятся гидроцилиндром 19 через полиспаст 17 с траверсой 18. Изменением угла наклона откидной части конвейера достигается различная дальность отброса грунта в сторону от траншеи.
Привод ходового устройства экскаватора при движении на рабочих скоростях осуществляется от гидромеханического ходоуменьшителя, включающего насос 8 переменной производительности, гидромотор 12 и понижающий редуктор. Гидрообъемный привод ходоуменьшителя выполнен по схеме гидронасос - гидромотор. Вращение от гидромотора через понижающие передачи раздаточного редуктора 7 передается сначала на средний, а затем на нижний валы, коробки передач 2 тягача, далее через коническую передачу 20, бортовые фрикционы 3 и бортовые редукторы 4 на ведущие звездочки 21 гусеничного движителя.
Другие рефераты на тему «Транспорт»:
- Проект реконструкции агрегатного участка автоколонны АК-1826
- Средства передвижения, используемые в туристском обслуживании. Анализ рынка транспортных средств г. Твери
- Развитие мирового сотрудничества России в области гражданской авиации
- Организация и ТО дорожно-строительных машин и систем массового обслуживания
- Бесстыковой путь и особенности его конструкции
Поиск рефератов
Последние рефераты раздела
- Проект пассажирского вагонного депо с разработкой контрольного пункта автосцепки
- Проектирование автомобильных дорог
- Проектирование автотранспортного предприятия МАЗ
- Производственно-техническая база предприятий автомобильного транспорта
- Расчет подъемного механизма самосвала
- Системы автоблокировки
- Совершенствование организации движения и снижение аварийности общественного транспорта в городе Витебск