Определение оптимального режима работы машины и указание рекомендуемый диапазон технологических и конструктивных параметров многоковшового роторного траншейного экскаватора
Некоторые модели экскаватора оборудованы складными конвейерами, а самые крупные — двумя конвейерами, что позволяет выдавать грунт одновременно по обе стороны от траншеи.
В экскаваторах с механической трансмиссией конвейеры имеют обычно привод на оба концевых барабана с натяжным устройством.
Ленты конвейеров снабжены бортами. Для предотвращения сбега с барабана ленты применяются с направ
ляющим ребром.
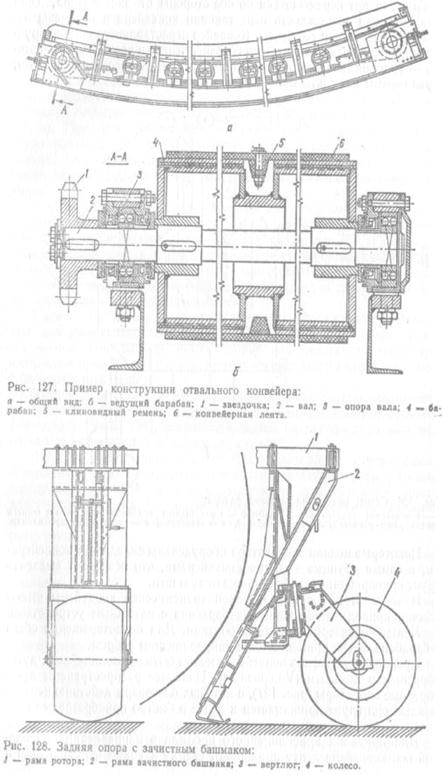
Продольный профиль конвейеров может быть прямолинейным, дугообразным и ломаным (V-образным). Наиболее распространены дугообразные конвейеры в которых благодаря действию центробежных сил грунт прижимается к ленте и быстро приобретает ее скорость.
Для придания криволинейного профиля в направлении продольной оси конвейера ленту прижимают сверху к концевым барабанам и промежуточным роликовым опорам резинотканевыми ремнями, которые одновременно служат элементами направляющих бортов для грунта.
Ходовое оборудование большинства моделей роторных траншейных экскаваторов гусеничное. Более рационален передний привод гусениц: двигатель и трансмиссия тележки располагаются впереди, а свободное место сзади тягача позволяет приблизить рабочий орган к центру тяжести всей машины. Рама экскаватора опирается на гусеничную тележку в трех точках: на две точки сзади и одну (балансир) — спереди.
Зачистной башмак служит для выравнивания дна траншеи. Он помещается на конце наклонной или криволинейной балки, находящейся в вертикальной осевой плоскости перемещения экскаватора и прикрепленной к задней по ходу экскаватора части рамы ротора и задней опоре. Грунт, перенесенный ротором через его верхнюю часть, подгребается зачистным башмаком под ротор.
2. Расчет основных деталей и узлов
Для предварительного определения массы машин служит ГОСТ 19618-74 и типаж на эти машины. Ориентировочные массы отдельных узлов экскаватора определяются по соответствующим показателям машин-аналогов с учетом правил масштабности конструкций, установленных по теории подобия.
Для определения общих размеров машины и ориентировочных размеров ее узлов служат эмпирические формулы.

Dp = 1,75 * 1.8 = 3.15
bk = 0.9 * 0.7 = 0.63
hk = 0.5 * 0.7 = 0.35
Tk = 3.14 * 3.15 / 0.35 = 28.26
lk = 0.4 * 28.26 = 11.3
3. Расчет технико-экономических показателей машины
Производительность:
Эксплуатационная производительность роторных траншейных экскаваторов по выносной способности, м3/ч,
Q = 3600 nmqkнkв/kр,
где n - частота вращения ротора, с-1; m - число ковшей; q - вместимость ковша, м3; kв - коэффициент использования машины по времени (0,7 .0,85); kн - коэффициент наполнения (0,9 . 1,1); kр - коэффициент разрыхления грунта (1,1…1,4).
Мощность:
Мощность, расходуемая на копание грунта, кВт,
Р = RК*Q/3600,
где Rк - удельное сопротивление копанию (кПа), зависящее от категории разрабатываемого грунта; для грунтов I категории Rк ~ 100 кПА, II категории Rк ~ 200 кПА, III - Rк ~ 300 кПА, IV - Rк ~ 400 кПа.
Глубина отрываемой траншеи :
![]()
Rp – радиус ротора до режущих кромок;
Ho.p – разница уровней платформы экскаватора и оси вращения ротора;
4. Тестовый расчет
Производительность:
Q= (3600*n*m*qz*kv*kn)/kp= (3600*0.13*14*0.16*0.7*0.9)/1.1 = 600 m3/ч
Мощность необходимая для рытья траншеи:
P = (Rk*Q)/3600 = (100*600)/3600 = 16.6 кВm
5. Методы, применяемые для определения оптимального режима работы
5.1 Нахождение max значения производительности с помощью метода Фибоначчи
Предположим, что нужно определить минимум как можно точнее, т. е. с наименьшим возможным интервалом неопределенности, но при этом можно выполнить только n вычислений функции. Как следует выбрать n точек, в которых вычисляется функция? С первого взгляда кажется ясным, что не следует искать решение для всех точек, получаемых в результате эксперимента. Напротив, надо попытаться сделать так, чтобы значения функции, полученные в предыдущих экспериментах, определяли положение последующих точек. Действительно, зная значения функции, мы тем самым имеем информацию о самой функции и положении ее минимума и используем эту информацию в дальнейшем поиске.
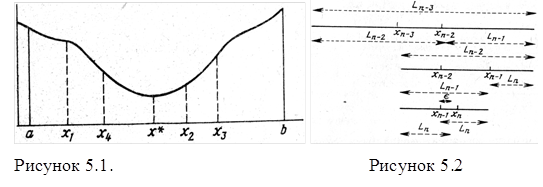
Предположим, что имеется интервал неопределенности (x1, x3) и известно значение функции f(х2) внутри этого интервала (см. рис. 5.1). Если можно вычислить функцию всего один раз в точке х*, то где следует поместить точку х4 , для того чтобы получить наименьший возможный интервал неопределенности?
Положим x2-x1 = L и х3 - x2 = R, причем L > R, и эти значения будут фиксированы, если известны x1, x2, x3. Если x4 находится в интервале (x1; x2) , то:
1) если f(х4) < f(x2), то новым интервалом неопределенности будет (x1; x2) длиной x2-x1 = L;
2) если f(х4) > f(х2), то новым интервалом неопределенности будет (x4; x3) длиной х3 - x4.
Поскольку не известно, какая из этих ситуаций будет иметь место, выберем x4 таким образом, чтобы минимизировать наибольшую из длин х3 - х4 и х2 - x1. Достигнуть этого можно, сделав длины х3 - x4 и х2 - x1 равными, т. е. поместив х4 внутри интервала симметрично относительно точки х2, уже лежащей внутри интервала. Любое другое положение точки x4 может привести к тому, что полученный интервал будет больше L. Помещая х4 симметрично относительно х2, мы ничем не рискуем в любом случае.
Если окажется, что можно выполнить еще одно вычисление функции, то следует применить описанную процедуру к интервалу (х1, х2), в котором есть значение функции, вычисленное в точке x4, или к интервалу (x4; x3) , в котором уже есть значение функции, вычисленное в точке х2. Следовательно, стратегия ясна с самого начала. Нужно поместить следующую точку внутри интервала неопределенности симметрично относительно уже находящейся там точке. Парадоксально, но, чтобы понять, как следует начинать вычисления, необходимо разобраться в том, как его следует кончать.
На n-м вычислении (рис. 5.2) n-ю точку следует поместить симметрично по отношению к (n-1)-й точке. Положение этой последней точки в принципе зависит от нас. Для того чтобы получить наибольшее уменьшение интервала на данном этапе, следует разделить пополам предыдущий интервал. Тогда точка хn, будет совпадать с точкой хп-1. Однако при этом мы не получаем никакой новой информации. Обычно точки хп-1 и хп отстоят друг от друга на достаточном расстоянии, чтобы определить, в какой половине, левой или правой, находится интервал неопределенности. Они помещаются на расстоянии є/2 по обе стороны от середины отрезка Lп-1; можно самим задать величину є или выбрать эту величину равной минимально возможному расстоянию между двумя точками. (Предположим, что в нашем примере инженер может регулировать температуру с интервалом в 1°С, поэтому є = 1.)
Другие рефераты на тему «Транспорт»:
Поиск рефератов
Последние рефераты раздела
- Проект пассажирского вагонного депо с разработкой контрольного пункта автосцепки
- Проектирование автомобильных дорог
- Проектирование автотранспортного предприятия МАЗ
- Производственно-техническая база предприятий автомобильного транспорта
- Расчет подъемного механизма самосвала
- Системы автоблокировки
- Совершенствование организации движения и снижение аварийности общественного транспорта в городе Витебск